
改造前のブラシレスギンバルを確認しておきます
公開日:
:
Brushless Gimbal
どうやっても水平が安定しません。朝から撮影して確認、バランス調整して撮影。確認してPIDを変更してまた撮影。バランス調整の繰り返し。バッテリー2本消費して、やっとここまで来たけど全然だめ(T_T) なんか8bit時代に戻ったような気分です。
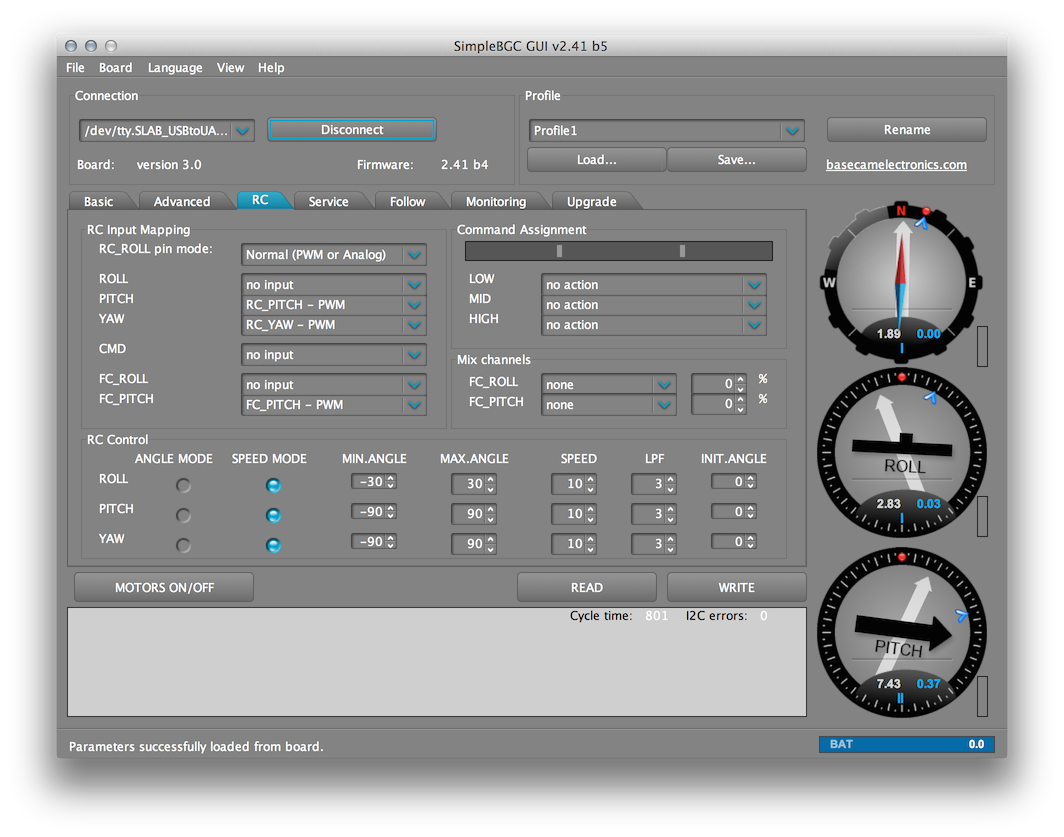
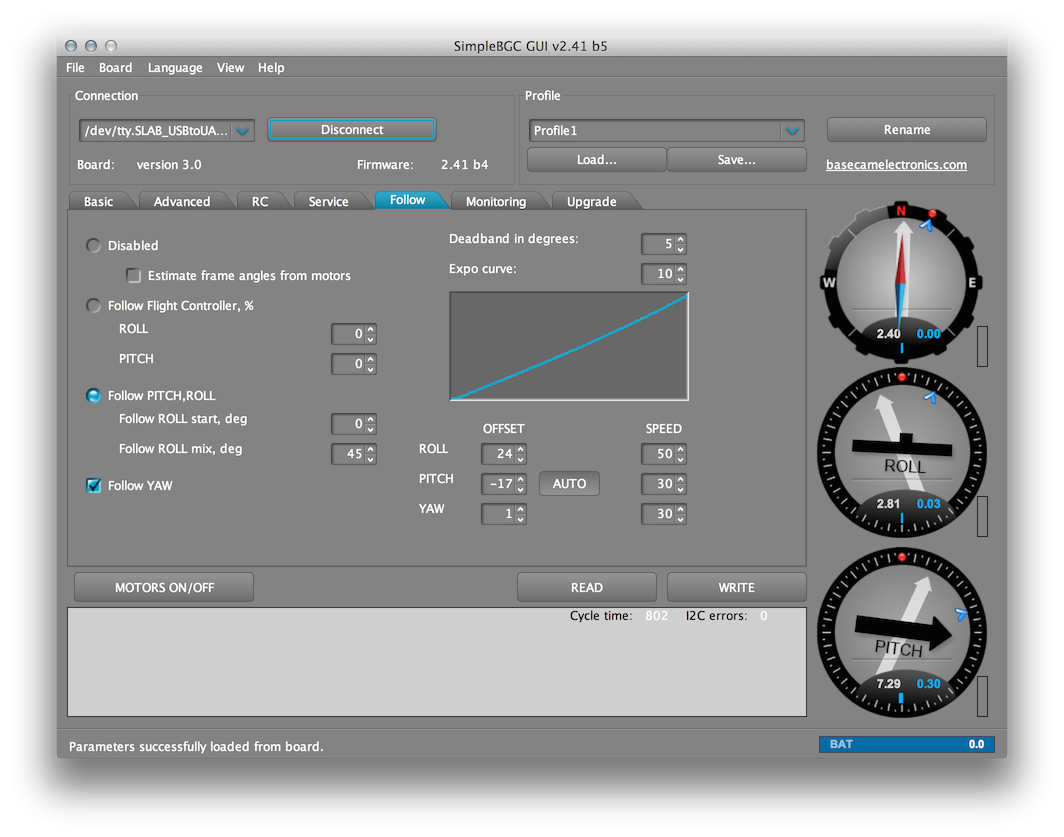
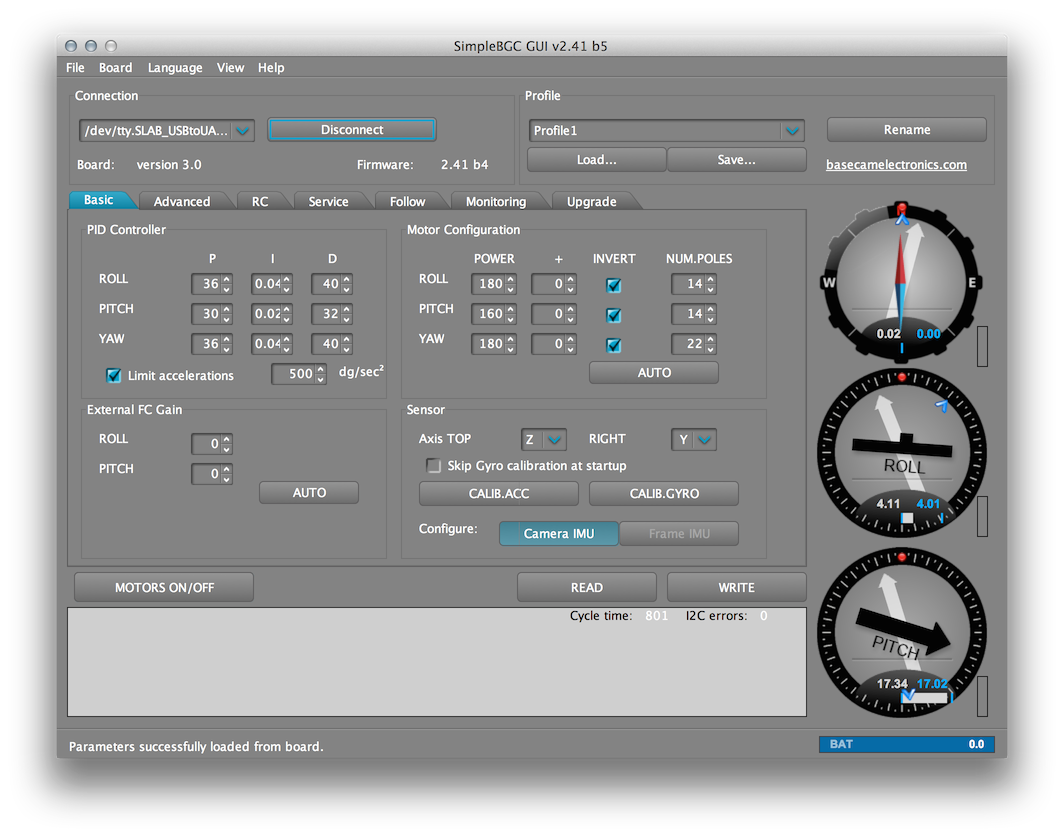
あきらめて改造することを決心しました。まずはセカンドセンサーを装着するつもりです。その前に現状確認ということで設定値とテスト動画をメモしておきます。
カメラはGH3で12-35mmF2.8 NDフィルター付き。YAWモーターが DYSGM60-80T ROLLがDYS BGM5208-200T-12 Hollow Shaft PITCHはiPower GBM5208-200T Shield で SimpleBGC_GUI_2_41b5のファームは2_41b4。
最初に設定値。
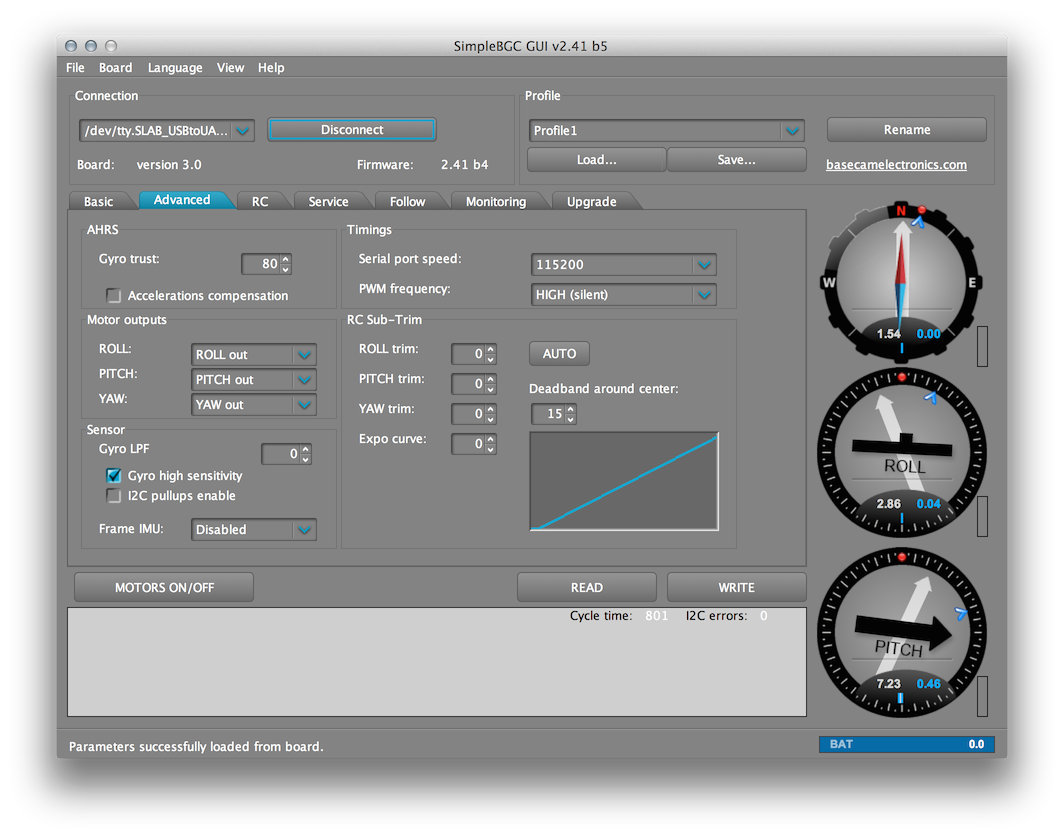

なんだかよくわからなくなってきました^^;こんな設定公開して誰の役に立つのか?まあいいか(笑)
この状態で撮影した動画。最初から左下がり?回転すると回転方向が下がります。これでも今日ベストの状況なんですよ。
天気はいいのに結果は残念。連休なのに地味な作業^^;明日には部品が届くので改造開始します。今日はもう放り投げて違うことして遊びます。
BeSteady ONE Plus – test shots from BeSteady on Vimeo.
追記:
PIDを調整して、前後のバランスを調整(YAWのモーター下で前後移動)若干安定したようにも思えます。ちょっと乱暴な操作でROLLがずれると、水平に戻るまで5秒程度静止させないとダメ。もう少し素早く戻る設定を探さないと。
Sponsored Link
関連記事
-

-
続・GH4 ショルダーリグ計画 – Rosette Handle Kit(Cheese Long Arm) 1443 開封編
いよいよ今回の計画の中心的役割を担う、ロゼッタハンドルキット(チーズロングアーム)の登場です。色々書
-

-
フルアクリルパネルATXミドルタワーPCケース JAX-02W (黒透 kurosuke)と玄人志向 NEXT電源
DaVinci Resolve Micro Panelがチラチラきになるのですが、DaVinciしか
-

-
Visual Basic 2008 Webbrowser の読み込み完了を待つ処理
読み込み完了を待たなければ、その後のフォーム処理が上手くいかない。 ちなみにフォーム処理は前日書いた
-
-
ペヤングやきそば「和風 焼き蕎麦」は醤油味
偶然みかけたペヤングの焼き蕎麦なる商品。見るからに不味そうなので買ってみました。どうみても、美味しく
-

-
SmallRigとBENRO S6の組み合わせを試行錯誤
風引いて寝込んでました。まだちょっと熱がある状態です。やたら忙しいところに急に暑くなったり寒かったり














ご質問は掲示板へお願いいたします。