
ブラシレスジンバル GUI 基本タブの適応PIDゲインコントロール
公開日:
:
Brushless Gimbal
結局円安が進み、先週末に116円を軽々と突破しました。ちょっと早いけど、毎年12月は円安っていうイメージなので、この調子だと120円にも届いてしまうのでしょうか?輸入品がバンバン値上がりしそう(T_T)
今日は Simple BGC GUI の基本タブの「適応ゲインコントロール」欄を確認してみました。最初にROLL・PITCH・YAWと3つあるチェックボックスの日本語ガイド
この設定グループはPIDゲインを適応させます。高いPID値によるシステムが不安定になった場合に、PIDゲインを減少させます。
正直意味不明なんですが、とりあえずはチェックするようにしています。チェックしても特別変化は感じられないのですが、無理な体制になったときにジンバルが暴れる(脱力する)のを防いでくれる?ような気がして^^;
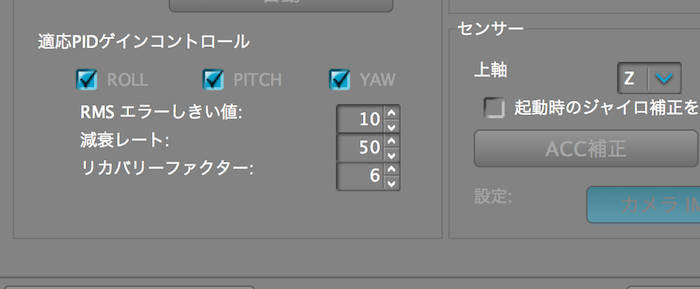
続いてRMSエラーしきい値
RMSエラーしきい値は水平の振動に影響を与えます。この閾値を超えた場合に適応PIDアルゴリズムが作動します。おすすめの値は10〜15です。
RMSってなんぞ?と思って検索してみると「二乗平均平方根」とか^^; これのエラーが10〜15を超えると発動する!って言われても^^; RMSって「モニター」タブでグラフのところにも見つからないし。謎なのでここは素直に10にしておきます。
減衰レート
この値を上げると、PIDゲインが減少します。システムが素早く静になる十分に大きな値を選択してください。
これまた良くわからない項目です。システムが素早く静かに…とあるので、ジンバルが暴れてから落ち着くまでの時間を早く出来るという意味なのでしょうか?謎なので初期値の50にしておきます。
リカバリーファクター
システムが安定した際に、どれだけ早くPIDゲインが戻るか設定します。低すぎる値では短時間、違う種類の振動が発生する可能性があります。高すぎる値では、低いPIDにより長時間不安定になります。おすすめの値は5〜6です。
ここまでよんで漠然と想像したイメージは、RMSでエラーを感知して、PIDゲインを減衰レートの値に下げて、リカバリーファクターで復帰するスピードを調整って感じかな?
問題はRMSエラーが出ている状況を、どうやって把握すればいいのか?
しかし毎日こんなの書いていても、一向に意味不明で謎は深まるばかり。段々疲れてきたよパトラッシュ〜
Test produit : stabilisateur 3 axes Zhiyun Z-ONE Pro from Laurent BRIERE – BEtrainedProd. on Vimeo.
ちっちゃいのもいいなぁ〜
Sponsored Link
関連記事
-

-
CANON EOS 5DMark II で撮影したRAW動画を編集(DaVinci Resolve Lite編)
暑い日があったり夜は妙に寒かったりと、田舎は温暖の変化が激しい時期になりました。最近すっかりハマって
-

-
BaseCam Simple BGC 32-bit ブラシレスジンバルコントローラーの雑談
7D MarkIIの動画サンプルが見つかりません。Gopro HERO4が間もなく発表みたいです。画
-

-
ああ Xcode よ
インストールも無事に終わりスタート台にたつことができた。 いや~時間がかかるかかる。かなりでかいのね
-

-
激安なワンタッチレンズキャップ
円安も進んで、すかりお買い得感の無くなってしまった海外通販。32bitコントローラーも決定打が見当た
-

-
デジタルなワイヤレスってるラベリアマイクを検討する(だけ)
またマイクの話か! と言われそうですが、やはりワイヤレスがないと不便じゃありませんか? そしてLED














ご質問は掲示板へお願いいたします。