
Simple BGC GUI 詳細タブの項目
公開日:
:
最終更新日:2014/11/17
Brushless Gimbal
それでも群馬県は自民党が強い。話題の小渕娘さん。選挙カーで「お育てください!」だけ連呼していたのが印象的でしたが、すっかり間違った育てられ方をされたようで。佐田常習的買春玄一郎とかもうね。
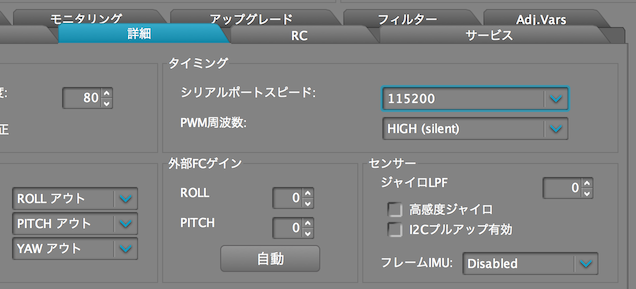
詳細タブの残り「タイミング」と「モーター出力」他について一応書いておきます。まずはタイミング欄の「シリアルポートスピード」
ボードとGUIと通信するシリアルポートのバンドレートを変更します。無線、またはBluetooth接続時にスピードを制限するために利用します。GUIはボードの設定に適応するようにシリアルポートスピードを自動調整します。
そして「PWM周波数」
モーターを駆動するPWM周波数を設定します。静音(高周波数)モードはバッテリーからの電力をより消費します。また、有音(低周波数)モードより少しだけ精密です。
となっています。ここは通常特に変更する必要は無さそうな部分です。
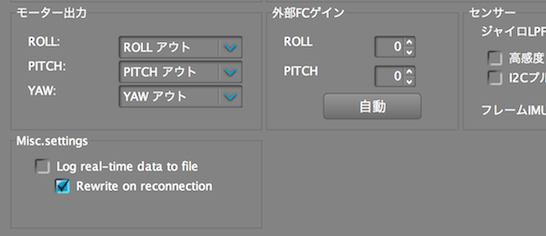
そしてモーター出力欄のROLL・PITCH・YAWは同じガイドになっています。
モーター出力を任意の軸に設定できます。例えば、PITCHとYAW(パン)軸のみを一つのコントローラーに割り当てて、ROLL=無効、PITCH=PITCH_OUT、YAW=ROLL_OUTと設定し、YAWモーターをROLL_OUTポートに接続することで、セカンドIMUを使用した、2つ目のコントローラーを3つめの軸の安定化のために使用することができます。
と、ここではちょっと変わった使い方の例が書かれています。コントローラーを2枚使うことができるように読めますが、一つでも苦労している私には、ちょっと範囲を超えている内容です。^^;
外部FCゲインゲイン
この設定は外部フライトコントローラーからの信号をジンバルのスタビライスに使用します。ゲインが正しくセットされている場合は、フレームが急に傾いてもカメラが水平を保つことができます。
これも外部フライトコントローラーが付いていないので関係ないと思われます。
そして「Misc.settings」です。ここは翻訳されていないようでガイドが出てきません。たぶんログ関係の設定なので私は無視しています。
以上簡単に詳細タブのガイドを書き起こしてみました。あらためて丁寧に読んでいくと、今まで気が付かなかったところが見えてきて、なんとなく頭のなかがスッキリしたように思います。
これ!
http://shop.chdntech.com/nebula/index.php
http://shop.chdntech.com/nebula/nebula4000-lite-gyroscope-gimbal-stabilizer-bmpcc-gh4-nex-eos-m-a7s.html
Sponsored Link
関連記事
-

-
Macのマウスがカクカクする件とセルスターレーダー探知機と DJI
α6300用に色々な小物を発注していますが、激安に目がくらんだebayなので、いったいいつになったら
-

-
今年最後の桜撮影テスト 十王公園の桜が散り始めて綺麗
Brsuhless Gimbal の設定を調整したので、近所の公園で撮影してきました。曇り空の合間の
-

-
5.5万円のアイスクリーム型ブラシレスジンバル Beholder登場
GWもそろそろ終わり。やっと道路が普通に戻ってくれます。この時期、県外からや色々と、運転が危ない人が
-

-
届いた!LiFeバッテリー KYPOM K6 9.9V 2100mA 開封編
デルの34型曲面ディスプレー(U3415W)が11万円で販売中のようです。21:9という脅威の横長は
-

-
厳選ベスト5の格安SIM(MVNO/LTE他)を発表!
ひきこもりの生活に必要性が無いのでスマートフォンを持っていない。正確に言えば iPhone5とiPh














Comment
Nebula4000 lite Gyroscope Gimbal stabilizer 見ました。
素晴らしいですね。
ケースも付いたフルパッケージで699ドル、これで良いんじゃないかと思ってしまいます。
気になるのはカメラを振った時のデジタル感が残っている事でしょうか。
スマホからも設定できるみたいですし買いですね。
誰か買ってください(笑)
おはようございます。
海外とか、ちょっとした街歩きに小さいのが欲しくてたまりません。たぶん小さいので縦揺れとかは厳しいかと思いますが、このサイズは魅力的ですよね。
見た目はゴツイけど小さいので重さもそれほどでは無いんじゃないかと想像しています。
しかし先立つモノが (T_T)
ご質問は掲示板へお願いいたします。