
DIY Brushless Gimbal の水平が不安定な件を考察
公開日:
:
Brushless Gimbal
ギンバルネタが続きます。どうも水平が安定しないので安心して眠れません。できれば若い嫁でももらって眠れませんになりたいもんですが…(自粛。 ともかく本日は近所のりんご園で撮影して気がついた点などを少々。「考察」とか書くとカッコイイかなって思って題名にしてみました^^;
結局、水平が安定しません。YAWがもイマイチですが、これは後で考えることとして、まずはROLL軸を安定させたい。
連休を利用して満開になったリンゴの花を撮影してきました。リンゴ自体は色々な種類があるのですが、花はみんな真っ白で、あまり変化のない絵ばかり^^; なんとかいい絵が取れないかと現場で試行錯誤(正確には行き当たりばったり)していて気が付きました。
スイッチオンから数分は水平が不安定。しばらく(5分程度)すると水平が安定してくる。ここまでは前から気がついていたのですが、今回ある程度の時間、撮影していた所、なんと水平が不安定になってきました。つまり
スイッチオン=不安定ー>しばらくすると安定ー>また不安定になる
んーーーーモーター変えないとダメ?
そこでコントローラー交換前の最終確認として、USB接続で Simple BGC GUI のメーターを確認してみることにしました。ギンバルが傾いている時にGUIのメーターはどうなっているのか? 仮説としては、本体が傾いているけどGUIのは水平といった場合、センサーの信号がうまく伝わっていない。どちらも傾いている場合はモーターがおかしい。と判断できるんじゃないかと。
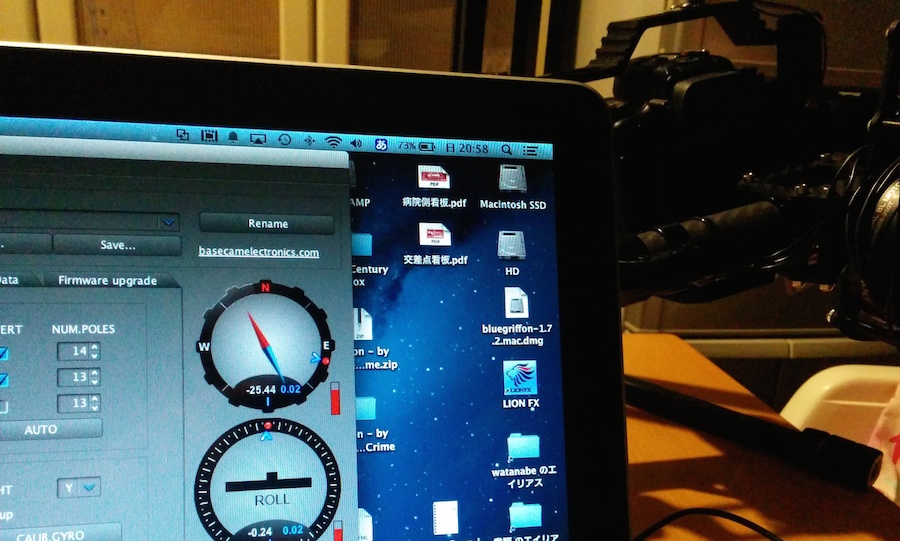
さっそく検証。写真ではわかりにくいけどROLL軸が左に下がっているのにGUIは水平になっています。この後「CARIB.GYRO」を押すと水平になります。USBをつないでGUIを立ち上げたまま(つまりこの状態のまま)Gimbalを右へ降ったり色々動かします。GImばl全体を上に向けると、ジワジワYAW軸が左を向きます(これも従来からの病状)。水平に戻すとROLLが左下がり。このときGUIは水平…
どうやらセンサーの精度がイマイチみたいに思えます。となると、ここはやはり32bit化ですかね?パーツもひと通り届いたので。
とりあえずモーターを1個発注してみました。DYS BGM5208-200T-12 Hollow Shaft Brushless Gimbal Motor とかいうヤツ。穴が大きくて線が通しやすそうなので。そのまま簡単に装着できるのかどうか?詳しい仕様がどこにもないのでチャレンジです。
そしてモーターが到着するまで暇なので32bitを装着して水平をテストしてみます。問題はIMUですが、最初は1個で挑戦してみようかと^^;でもカメラセンサーって基板に直接ハンダ付けされてるし…
Sponsored Link
関連記事
-

-
URSA mini 4.6KとNDフィルターで超テキトウなテスト撮影
少々気になっていた NDフィルターの使用による IR Pollustion。少し日がさしてきたので室
-

-
MacBook Pro 15 Retina に KURO-DACHI/CLONE/U3 と WD 3.0TB
動画を撮影していて、だんだんハードディスクが苦しくなってきました。新しいMacのノートはSSDが50
-

-
URSA mini 4.6K と GH4 と α6300の Log を比較してみる
比較してみるとか言ったって、いつものごとく超適当。できれば全てを URSAで撮影したいけど、色々あっ
-
-
【失敗】究極のプレビューモニターを発見!低価格&軽量&ワイヤレス&多機能 for SONY α and GH5
MOZA AirCrossを手に入れて、すっかり ラン&ガンスタイルに入れ込んでいます。 期待
-

-
時代はMOVIEでしょ?
画像で説明するのも面倒だし、動画のがわかりやすいかなぁ? と思って画面を動画でキャプチ














Comment
最近BGを始めたばかりのものです。
ですので助言とか出来る立場の者でないので私の確認のためと思い耳を傾けて頂けるとありがたいです。
Simple BGC GUIのNUM.POLESですが確かモーターの永久磁石の数だったと。
そしてAUTOで正確に設定するにはPIDは全て0でPOWERは80以上にして実行する必要があるとPDFの説明書に書いてあったと思います。
またそれでもAUTOは度々あり得ない数字になるのでその場合はじかに数えた数字を入れて下さいと。
お門違いならスイマセン。
私が知る限りブラシネスモーターは永久磁石の数は14や22の偶数だったので13と言う数字のせいもあるのかと思ったもので。
ただ画像を見る限りROLLは14なので関係ないかも知れません。
その時はあしからず。
例
iPower GBM5206-150T
Configuration:12N14P
だと14が永久磁石でコイル数が12
DYS BGM5208-200T-12
も同じ構成です。
GUIがデフォルトで14なるのは多いパターンだったからのようです。
DYS BGM5208-75
などは24N22Pなので22です。
コイル数が多くてもトルクが出せるようになってきて最近はYAW用のモーターでもDYS GM60-80Tのように22のものが出て来ていますね。
杉吉さん おはようございます。
まずはコメントありがとうございます。そして丁寧な説明も感謝感謝です。磁石の数だったんですね。なるほど、モーターの隙間から見える動線が巻いてある部分の数なのかなぁ〜とか思ってました^^;なんとなくwということは14って手入力しちゃえばいいってことですね。なんかやるたびに13だったり14だったりするので、普通に全部14じゃねーの?とか思ったりもしてました。意外と正解ですね(笑)
コイル数が多くてもトルクが出せるようになってきて…ということはコイル数が多いほうが何か良い点があるのでしょうかね?精度が高いみたいな感じなんでしょうか?
色々難しいですねぇ〜^^;
と、質問ばかりしているような御礼文章ですが、これからもよろしくお付き合い下さい。
ありがとうございました。心より!
スイマセン訂正があります。
読みなおしたところAUTOで正確に設定する時にPIDは全て0でPOWERは80以上にして実行しなければならないのはINVERTだけのようです。NUMは関係なくあてになりませんけど。
こちらこそよろしくお願いします。
前回はご挨拶なしに失礼しました。
私の使っているBGはDYSです。モーターはデフォルトのBGM5208-200T-12が1つとBGM5208-75が2つの構成です。NUMの数字はR22P22Y14です。
バランス設定の時に磁石間をジャンプして止まる感覚を経験しているかと思います。
私が実感するのはその感覚が狭いほうが幾分平行をとるのが楽なのかなぐらいですね。
訂正ありがとうございます。
勝手ですが設定ガイドに引用させていただきました。まずい場合はお知らせください。
BGM5208にも200とか180とか75など色々ありますが、性能の違いって何なんでしょうね?センターの穴が違うとかコイル&磁石の数が違うとかはなんとなく理解できるのですが、実際それがどう影響しているのか^^;調べていても中々理解できるものがありません。
まあ単に私の頭では理解できないって話もありそうです(笑)
こちらこそご丁寧にどうもです。
気軽に書き込んでください。ブログやっててコメントがあるってすごく嬉しいもんです(^_^;)
こんばんは
おじゃまします
同じくSimple BGCと格闘してます。
私は 5Dmark3に17-40mmでやってます。
同じく 安定しなくて困ってました。
最近は だいぶ安定してきました。
たぶん バランスどりを追い込めば大丈夫だと思います。
静止状態だけでなく ハンドルやカメラを傾けた位置でのバランスなど ギンバルのホンの少しのゆがみでも 傾けた位置でのバランスが変わってしまいます。
この辺りを追い込むと安定してくると思いますよ。
今はFOLLOWモードがうまくいかない。
スリップしてしまうのが悩みで
どなたか解決方法ありましたら教えてください。
ブログ拝見するのを楽しみにしてます。
頑張ってください。
こんばんは!コメントありがとうございます。
全然ネタ違いじゃないですよ(笑)
バランスどりって電源入れない状態でってことですよね?
なかなか狂牛病状態なのでちょうど今バランス取り直しています。
基板も変わったのぜ前後も微妙に変わっているだろうしって思いまして。
なかなか英語が大変なので色々教えてもらえるとホントありがたいです。
気になったら一言でもいいので気軽に書いてくださいませ。
なんか日記みたいになってきましたが頑張って書いていくつもりです。
よろしくお願いいたします。
ごめんなさい
ちょっとネタ違いでしたね
ご質問は掲示板へお願いいたします。