
安定合格ラインな 2.43b6 自動PID設定のまとめ
公開日:
:
Brushless Gimbal
いつの間にか vimeo が微妙に日本語になっています。これって前からなんでしょうか?なんかすごく見慣れなくてカッコ悪いように感じるんですけど。どうして日本語ってかっこ悪く見えるのでしょうか?単なる外国へのあこがれなのかな?
ココ数日、はまっていた自動PID設定ですが、そこそこ安定してきたので、ここで一度まとめておきます。
GH3 12-35mm f2.8
ブラシレスジンバル本体 DYS Eagle Eye HHG5D系(たぶんコピー品)
YAWモーター DYS GM60-80T
ROLLモーター DYS BGM5208-200T-12 Hollow Shaft
PITCHモーター iPower GBM5208H-200T
32bitコントローラー&シングルセンサー
ジョイスティック無し
最初に私が色々試して気がついた点を参考までにメモしておきます。絶対コレが正しいぜ!って話じゃないのでご了承くださいませ。
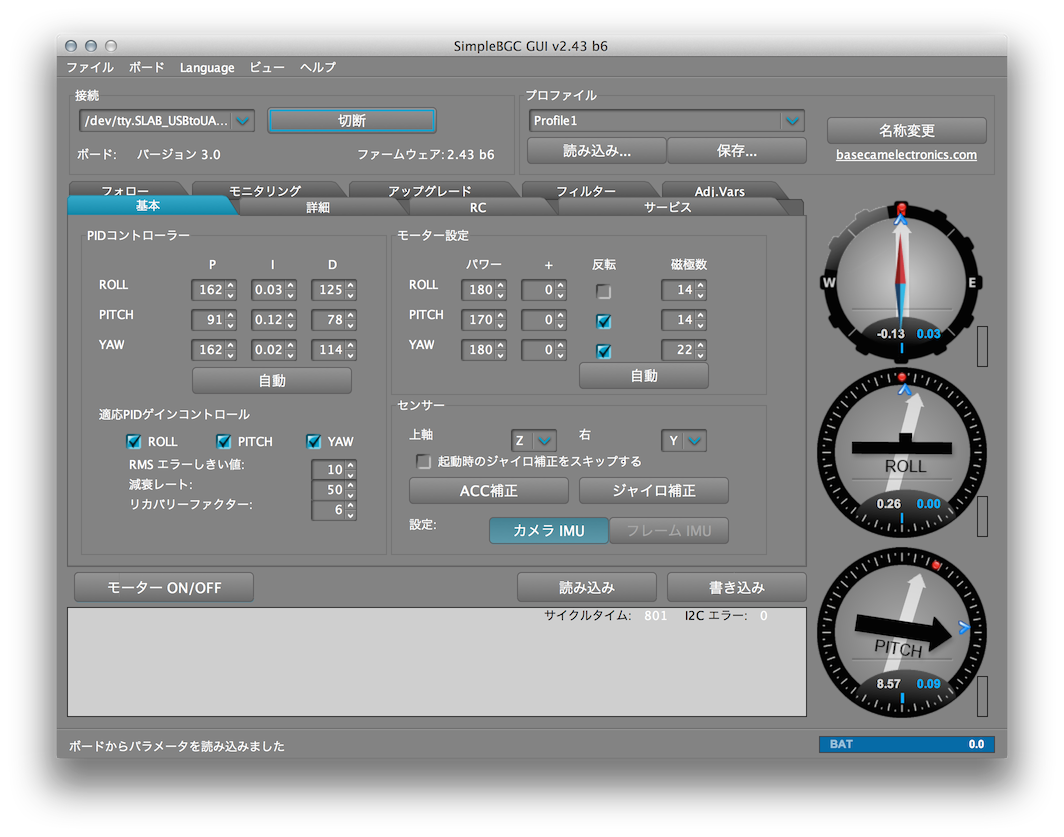
自動PIDは、最初に3軸同時に実行してからケーブル外して再起動。再度接続してROLL、PITCH、YAWの順で個別に再度オートを実行しています。いきなり個別にやると、なぜか終わらなかったり数値がむちゃくちゃ低かったりするので、面倒ですがこの順番でやってます。個別を ROLL -> PITCH -> YAW として、再度 ROLL -> PITCH -> YAW とやることが多いかな?
適応PIDゲインコントロールのチェックは、自動PIDが終わってからチェックを入れています。また、ジンバル本体をスタンドにしっかり固定して自動PIDを実行しましょう。グラグラだと正しい数値はでてこないようです。
モーターのパワー値は、できるだけ高い数値の方が出てくるPID値が安定するようです。私のモーターパワーをチェックする方法は、電源を入れてジンバルで5分程度遊んでみてモーターが暑くなっていないかどうか触ってみる。ジンバルを逆さまにしてビビり音などが出ない範囲で上げていく。各軸のパワー値を YAW >= ROLL >= PITCH となるよう設定しています。
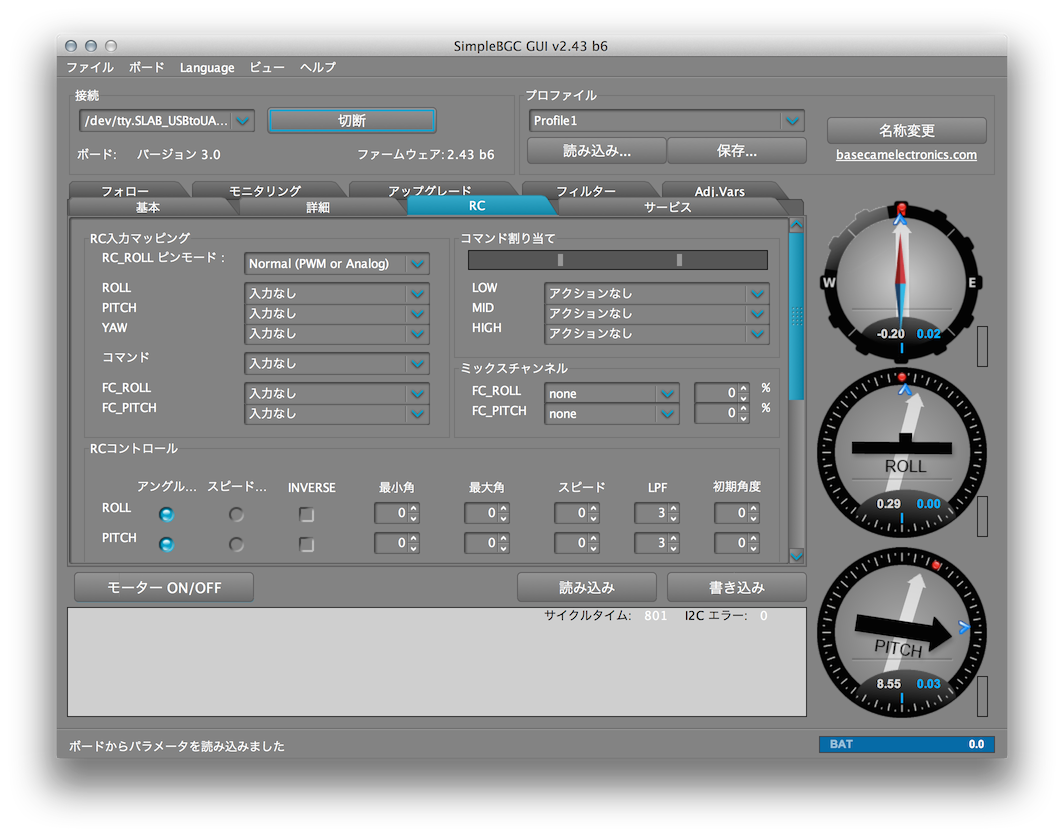


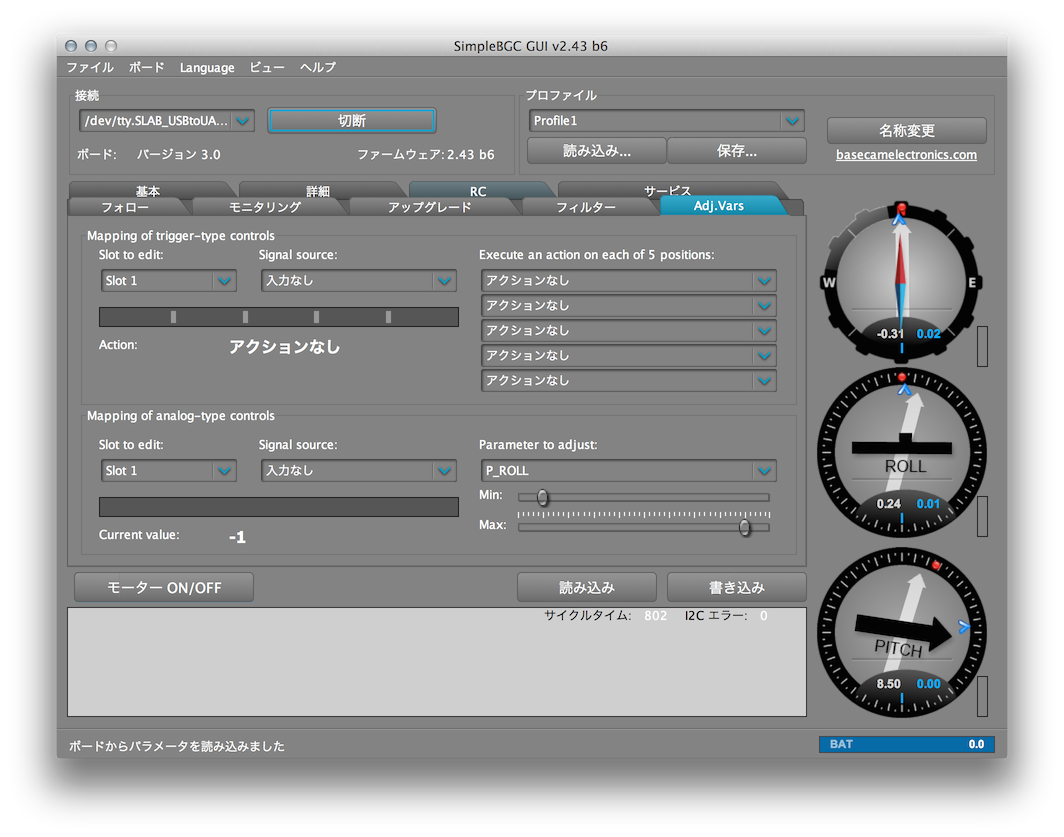
ちなみに数値はこのままで、フォロータブの左側を「無効」フレームの角度をモーターから予測にチェックに変更してもジンバルは安定しています。
以上、参考になれば幸いです。
Sponsored Link
関連記事
-

-
ムービー関連の小ネタを色々メモ
すっかりお世話になっているカスタマイズ事例をお休みして、今日は細かいネタをまとめておこうと思います。
-
-
URSA mini 設定カスタマイズ:フォールスカラーのボタン割り当て不可?
今日は晴れかと思ってテスト撮影の予定だったのですが、起きたらなんと雪が舞っているという。おまけに北風
-

-
予定日より2日早く edelkrone FocusONE PROが届いたから開封編
晴天の土曜日。桜も終わり風も強くて、お出かけにはイマイチな感じ。こんな日はゆったり家で読書三昧でしょ

-
-
SimpleBGC_GUIで Sensor is not connected トラブル
台風接近中です。関西地方の方は特にご注意ください。雨がすごいので「ちょっと用水路見てくるわ」とか言っ














ご質問は掲示板へお願いいたします。