
Simple BGC GUI の微調整と Final Cut Pro 10.1.1の AVCHD 読み込み方法
公開日:
:
Brushless Gimbal
日曜日に近所の道の駅にテスト撮影。まあ平日も行くんで曜日は関係ないのですが^^;ともかくテストに行って玉砕してきました。そこで調整してみたよ〜報告と Final Cutでその時のデータが読めなくて悩んだ話を。
市長選が終わり無事に応援していた候補が初当選しました。なんとなくホッとしたような全然応援活動していないのに疲れたような。歳ですね。
投票に行って暇だったので近所にお散歩がてら Brushless Gimbal 持ちだしてテスト撮影となりました。結果はんーーーー要調整! 前回PIDのPやモーターのパワーを上げ気味にしたのですが、やはりこれが原因らしく、ちょっとしたストレスがかかるとブルブル微妙に暴れてしまいます。スグに収まるのですが。
気にしていた水平も思ったほど効果がなく、がっかりして帰宅。悩むこと数分。PIDのDを上げてみることにしました。
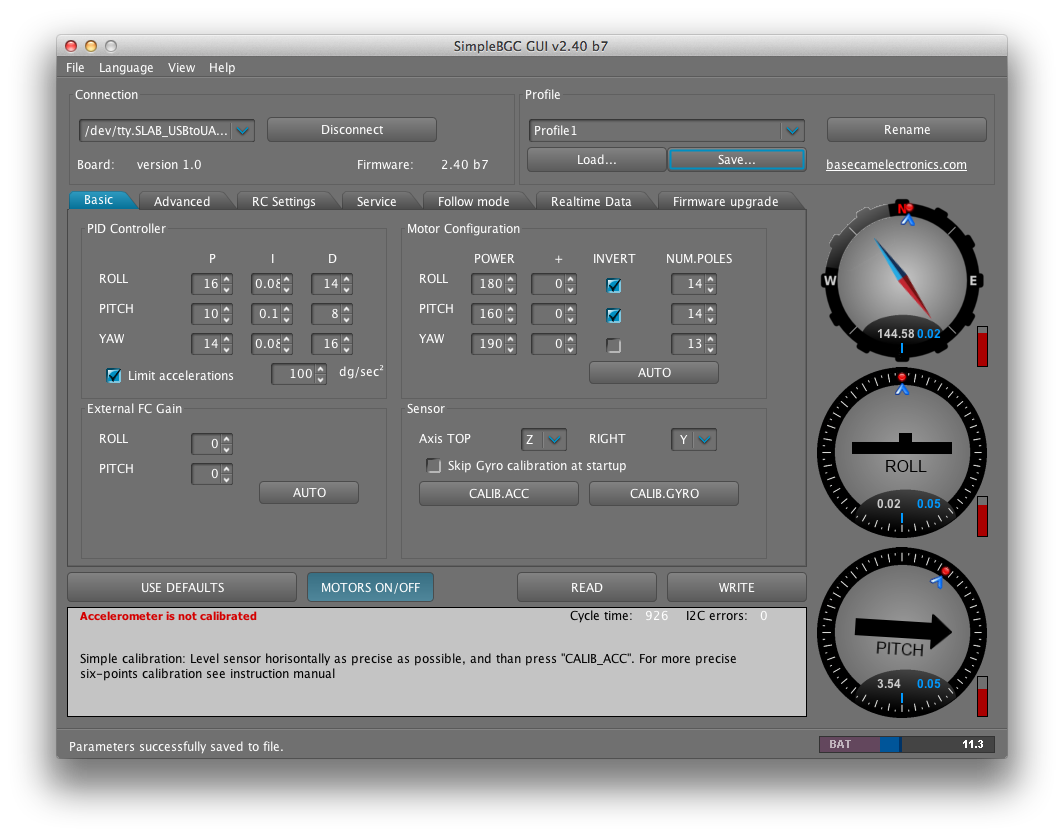
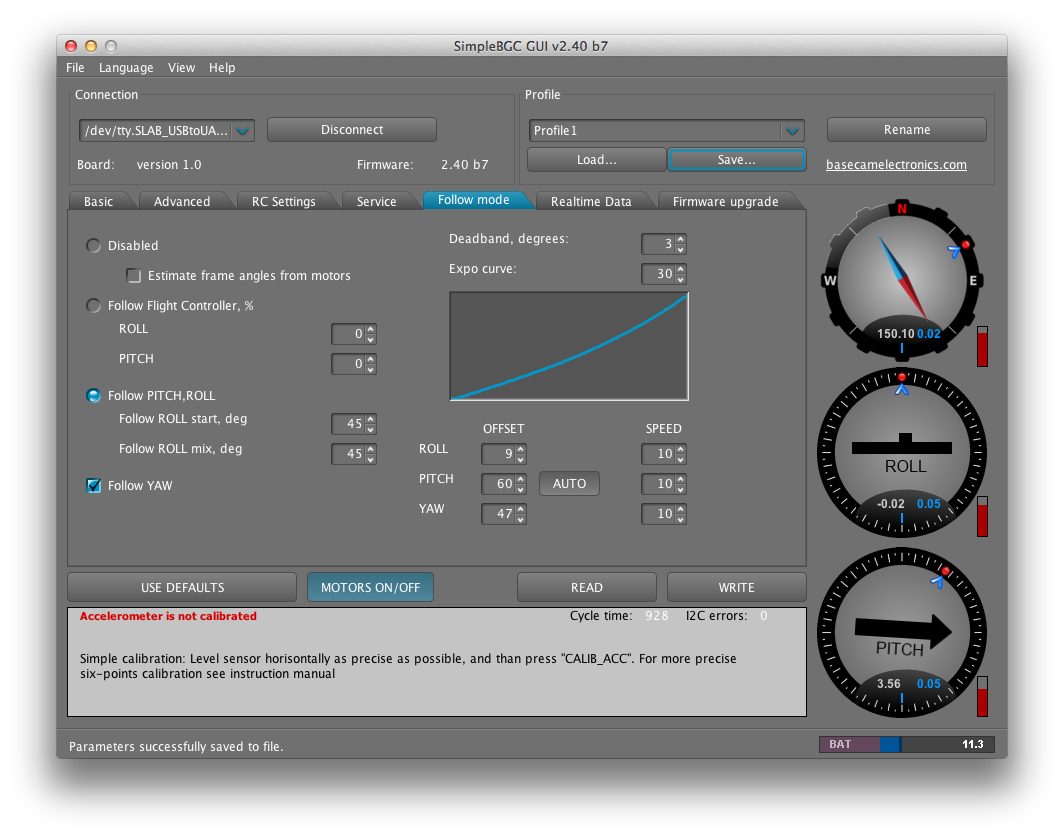
変えたのはROLLのDを12->14とYAWのDを14->16の2箇所。そして Follow Mode タブの Deadband deg.を3に、その下を30にしてみました。
家の中で試した感じでは過去最高の感触です。今日は新しく購入した仕事用PCもセットする必要があるので、後日天気を見ながらテストしてきます。でも、ROLL軸が安定していない。電源入れてしばらくするとしっかり水平を保つけど、電源投入後しばらくは水平がフニャフニャって気がします。気のせいなのか仕様なのか…謎。
話は変わって。Final Cut Pro X (10.1.1)で GH2のデータが読めなくなっていることに気が付きました。今まで何も考えないで読み込みできていたのに何故?
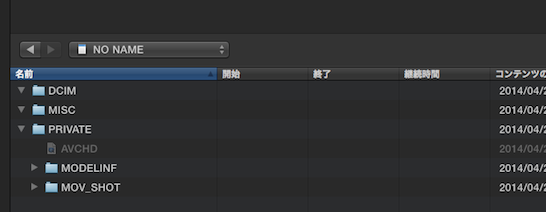
仕方ないのでSDをファインダーからフォルダー開いてprivateフォルダの中にあるAVCHDファイルを右クリック。メニューからパッケージの内容を表示。
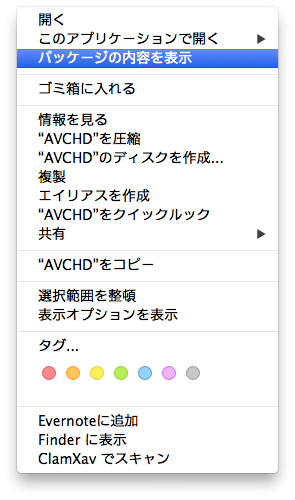
なんとか目的のデータを見つけ出しました。
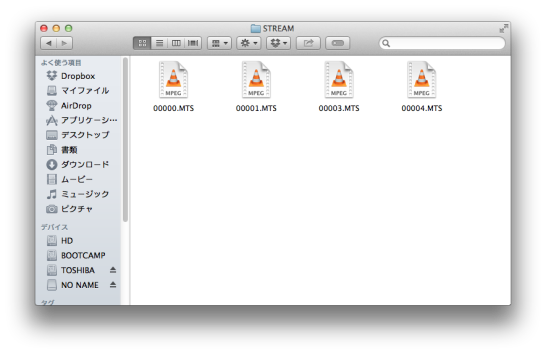
これを別の場所に移動(コピー)して、FinalCutに読み込むことに成功しました。面倒だけど変わったの?俺、何かしたのかな?
32bitが追跡可能になりました〜〜〜
追伸:たまに思い出してみるとニヤニヤしてしまう。
Sponsored Link
関連記事
-

-
ああ Xcode よ
インストールも無事に終わりスタート台にたつことができた。 いや~時間がかかるかかる。かなりでかいのね
-

-
カスタマイズ続編!ブラシレスジンバル (3 Axis Brushless Gimbal)
またまた来ましたギンバルカスタマイズのご紹介。今回も引き続き、あの方のカスタマイズ続編を画像付きで送
-

-
SONY α6300のS-logとスマートホンのリモコン
実践投入は、もうしばらく先になりそうなので、それまでに慣れておかないとと言うことで、まずは S-Lo
-

-
Alexmos Brushless Gimbal のジョイスティック配線図(8bit版)
初心者向けのコントローラー配線図です。印刷して使ってください。というわけで、悩める子羊たちに希望の光
-
-
DB:members作成
phpmyadmin にてmembers table を作成 id INT UNSIGNED AUT














Comment
動画見ました。
ニワトリって6軸くらいのスタビライザーができそうな感じ(笑)
YouTubeで検索すると4Axisを作った方を発見!
タイトル”4 Axis Gimbal World’s first??”
ほう!なるほど~これってステディカムのアームアンドベストのアーム部分に似ている構造ですね。
PIDの設定は過去最高なんですね。おめでとうございます!わたしも真似させて頂きます。
このPID(比例・微分・積分)をいろいろと調べると高校の数学授業で受けたはず??なんですが、まったくさっぱり理解できず・・・あーちゃんと勉強すればなぁ~後悔。引き続き勉強中・・・
ロール軸の動きが気になりますね。
試しに面倒ですが他の軸モータと入れ替えてテストするというのはどうでしょうか?
これでちゃんと動けばモーターの不調かと思います。またモーターのコードが交換できるのであれば、これも試してみることもできますね。
あとは(もうやっていらっしゃると思いますが)テスターでケーブル接続が確実かどうか一つ一つ調べる方法でしょうか。
ラストはモーターに何かネジなどが挟まっていないか確認でしょうか。
ナント!行方不明のネジ1本がロールモータの中に張り付いていました!よく動いていたなぁ~と感心(笑)
私のは電源投入後、終わりまでしっかりと水平をがっちり維持してくれています。何かにぶつけたり、手で動かしたりしない限りはうまく動いています。
こんなときはリセットボタンで元に戻ります。
こんばんわ。
4 Axis Gimbal World’s first見ました。ちょっとゴツイけどいいですね。
PIDはいい感じだと思うのですが、やっぱり電源投入直後が不安定です。
気になっているのが2点あります。
本体を手で持ってスイッチオンすると、動き出すまでかなり時間がかかります。
スイッチオンからしばらく経つと、水平が安定します。安定すると水平状態が続くので、一応モーター自体は動いているのでは?と思っていますが、確信があるわけでもなく。
検証してみたいのが2点あります。
なんとなくセンサーがらみな気がするのでフェライトコア入れて試してみる。
起動時にセンサーのリセット(設定ソフトの「Skip Gyro calibration at startup」のチェック)を変えて変化を調べる。
まずはここを試してみる予定です。
32bitを試してもイマイチな場合はモーターを変えることも考えています。でも、何買えばいいのか全然わからないので^^; どうせなら少しパワーアップしたやつがいいかと思うのですが、どれがどう違うのか色々情報を探しているところです。
GUIの数値もYoutube見て色々調べるのですが、数値よりも、モーターがこのぐらい熱くなるのはやばいとか、本体をこうやっても安定しているのが目安とか、基準がわからないので結局試行錯誤になってます。一度、他人のブツと比較してみたり操作させてもらったりしたいのですが、田舎で誰もいないし(T_T)
まあ、遊びなので悩みながらも楽しみながらやっていきます。
色々アドバイスありがとうございます。
試してみたらまた報告しますのでアドバイスよろしくです(笑)
このブラシレスジンバルは研究と努力を必要とする道具ですよね。このあたりはステディカムと共通するような気がします。
フェライトコアを入れる前の様子なんですが、上手く動いている途中で急にピッチやヨーモーターが「ガクン」と動いたり、ロールがゆっくりと傾き始めたりする症状でした。もしかして似ているような気もします。
今回の設定を使わせていただきました。大変感謝申し上げます。実に良いフォローモードになりました。ハンドルを左右にゆっくり動かすと滑らかに追従してパンします。最高です!
試しに子供に持たせて私を後ろから追い撮りさせました。見事に滑らかな撮影が出来ました。初めて持たせた人間でもスムーズに撮れるとは驚きです。
GH4をスマホやネクサス7にWifi接続し、HDMIモニターの代わりに使っています。スマホから全てコントロール出来ますね。GH4は本気で作られたカメラだと感じました。
やっぱりノイズ対策が必要みたいですね。症状がそんな感じです。何か分解して探さないと^^;
設定が少しでも役立っていれば幸いです。ちょこちょこ修正して試しているので、また定期的に報告しようと思っています。さっきも「RC Setting」の一番下の「YAW-MIN.ANGLE & MAX.ANGLE」を45から-90 90にして試していました。左右に大きく(素早く)回転させた場合に、こっちのが暴れにくい感じがしています。
スマホでカメラを動かせるのはいいですね。軽いし。シャッターも動かせるんですよね?いいな〜ぁぁ。それで例のモジュールも使えれば…いいなぁ〜欲しくて行っちゃいそうですが幸い在庫が無いようで助かってます^^;
追加コメントです。長くなってすみません。
私の場合はハンドルの三脚を伸ばして、水平な場所でブラシレスジンバルを起動させます。5秒くらい待つとウォーミングアップみたいに最初ヨー、ピッチがガクッと動いて、次にロールもガクッと動きます。そしてゆっくりと所定位置に戻っていきます。ロールは水平になり、ピッチはなぜか上もしくは下のほうへわずかに傾いています。そこはジョイスティックで微調整してまっすぐに整えます。
これで準備OKとなるのでハンドルを持って撮影を開始します。
私のはこんな感じです。
やっぱり起動時は安定した状態じゃないとダメなんでしょうかね?スタンド持ち歩くのも面倒なんですよね。車の場合はいいけど。
私のは起動時にガクガク狂牛病です。調子が悪いと左40度向いてスタートします(笑)一度分解してバランス撮り直したほうがいいのかもしれませんね。フェライトコア試してからやってみます。
ありがとうございます。
ご質問は掲示板へお願いいたします。