
SimpleBGC Software User Manual を解読する
公開日:
:
最終更新日:2014/06/25
Brushless Gimbal
SimpleBGC Software User Manualなるものがある。もちろん英語版とかフランス語版とか、驚きの中国語版もある。けど日本語版は無い(T_T) 頑張って日本語に訳して掲載しようかと思ったけど、考えたら著作権とかありそうだし、責任も持てないのであきらめて、自分なりの解釈をメモしていくことにしました。ありがとう。
SimpleBGC Software User Manual
http://www.basecamelectronics.com/downloads/
Board ver. 1.0 Firmware ver. 2.3 GUI ver. 2.3
Google先生と一緒に日本語に訳してみました。当然ですが、内容が間違っていても私は一切責任は負えませんことをご了承くだされ。
Connection to PC
FTDI社のインターフェースを装備したメインコントローラボードをPCに接続するには。USB-シリアル変換器および適切なソフトウェアドライバが必要になります。統合されたUSBインタフェースを備えたボードのバージョンの場合には、ミニUSBケーブルが必要です。 USB接続のためには、適切なソフトウェアドライバをインストールする必要があります。お使いのコントローラによっては、FTDI社のチップドライバはhttp://www.ftdichip.com/Drivers/VCP.htm
またはCP2102チップの使用のために
http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx
ドライバをインストールして、ボードを接続した後、いずれの場合も、新しい仮想COMポートが作成されます。あなたが接続を開始するSimleBGCソフトウェア(GUI)でこのCOMポートを選択する必要があります。
つまりメインコントローラーボードとPCをUSBで接続して SimpleBGC ってソフトで設定を弄くり倒すってことですね。
(1)USBを接続する前にドライバー入れろと。
(2)FTDIチップとCP2102チップでドライバーが違うからねっ。
(3)新しい仮想ポートをSimpleBGCで指定しろって。
ここで問題です。FTDIチップなのかCP2102なのかを判定する方法を答えなさい。

じっと基板を見る….覗きこんでみる…..よくわからないので少し分解してみる….
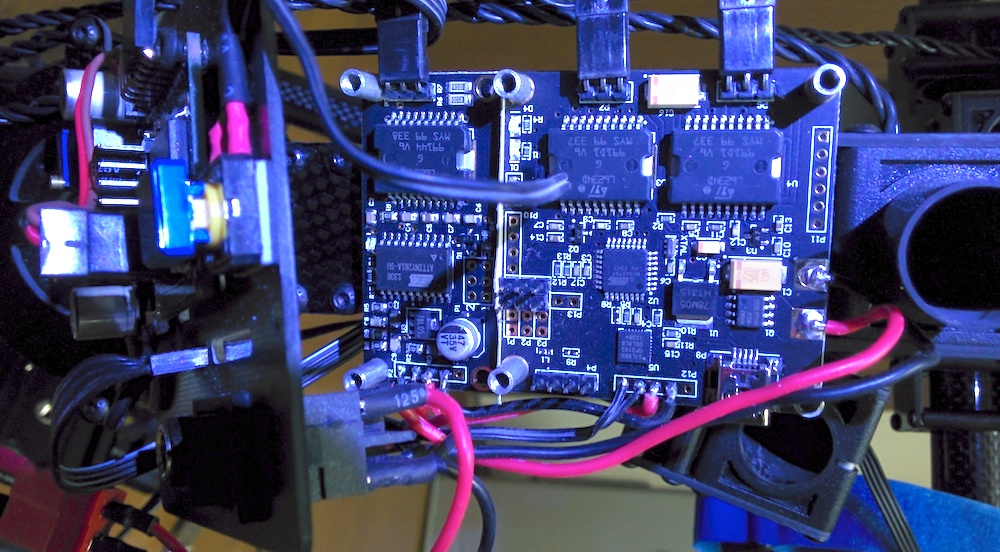
はい!不明!!!ということなので、わかんないので瞬時に開き直り。
「ドライバでしょ?両方いれとけ!」
ってことで両方ダウンロードして解凍してインストーラー立ち上げてインストール。なんか解凍できないようなエラーも出たけど解凍できている?ようなので次へ進みます。
「よし!USB接続ゴー」
って繋いだら、CP21なんちゃらドライバーなんちゃらって….最初につなげば両方入れなくて済んだのに…(T_T)。
気を取り直して XLoader.zip を解凍し起動。SimpleBGC_2_3b5.enc.hex (84Kb 9.11.2013)を読み込んで DeviceをsimpleBGC。COM portを選択。今回は COM7 でした。動画じゃみんな COM3なのに。Baud rate 115200で Upload !!
基板がチカチカ光ってます!おー感激!
続いて SimpleBGC を起動!Java 入れろやって怒られる。いやだけどインストールして再度起動!画面左上のconnectionでCOM7を選んで右側のボタンを押すと…モーターの高周波音が微かに響く。そしてガックンガックンwww壊れそうなので一旦停止。connectionの横のボタンを押すと切断できます。なんとか繋がることを確認できました。
ここまでの流れは次の動画でご覧いただけます。若干バージョンが古いけど、ほとんど変わらないと思います。
ということで、こんなページ参考にならないから以下を参照ください^^;
http://iwasakijp.com/brushlessgimbal/3axis1/
AlexMos Brushless Gimbal Controller (SImpleBGC) Tuning Guide
キャリブレーション
続いて初期化作業です。バッテリーはまだつないじゃいけません。
まず左下の USE DEFAULTS をクリック。センサーを6面回転させてCALIB.ACC をクリックしていきます。
この作業は次の動画がわかりやすく解説されています。まずは100円ショップに行ってサイコロ貯金箱を買ってきましょう。ちなみに私は赤を買いましたwもちろん単3電池を貼りました。
センサーを貼るときには、できるだけまっすぐになるように、目見当ではありますが注意しました。そして、ジンバルが暴れないように基板からモーターにつながっている配線を、一応メモして外して作業しました。ボタンクリックして基板のピカピカ点滅が終われば、次の面に行っても大丈夫なのかな?
問題はX軸とかZとか軸の方向。これがまったく理解できず、結局動かしながら画面右側の丸い矢印の動きを見て、同じ方向になるように、延々とX変えてWRITE押して…でやっと見つけました。Zと-X。
本題のキャリブレーション開始。6面の順番は適当で良いようです。終わったら「Write」ボタンを押さないとダメですよ。
きちんと初期化されたのかどうか不安ですが確認方法もわからないのでヨシとして次。センサーを元の位置に取り付けて、この作業は終了。サイコロと電池はしまっておきます。この作業は、たまにやったほうがいいらしいので、次の出番に備えます。一応ここまでの設定を右上で保存。
はじめてのSimpleBGCで設定!ですが
最初にマニュアルの注意すべきポイントを書き出してみます。くれぐれも間違っている可能性があることにご注意ください。
GUIソフトウェアにメインコントローラボードを接続する手順は次のとおりです。:
・FTDI社のアダプタケーブルの右の極性(黒線は通常「グランド」線である)、ボード上にUSBポートがある場合には、ミニUSBケーブルを使用して接続します。
・GUIを起動し、リストから正しいCOMポートを選択し、「接続」をクリックします。
接続が確立された後、すべてのボードの設定とプロファイルは、GUIにロードされる。あなたが”READ”ボタンをクリックして、いつでも現在のボードのパラメータを再ロードすることができます。
・GUIでパラメータを調整した後は、「書き込み」ボタンをクリックして、コントローラボードに書き込む必要があります。現在のプロファイルパラメータは、ボードに保存されます。設定は「デフォルトにリセット」ボタンを押して、デフォルトに戻ります。
・(GUIウィンドウの右上にあります)プロファイルのリストから選択します(設定が異なる)別のプロファイルを選択します。あなたは、コントローラボードの上に、3つのプロファイルとして別の設定を保存することができます。あなたはGUIでプロファイルを選択するか、コントローラボード上のMENUボタンを押して、ボード上に保存されたプロファイルを切り替えることができます。一部の設定は、すべてのプロファイルに共通なので、プロファイルごとに保存することはできないことを覚えておいてください。センサの向き、ハードウェア構成、RC入力、およびモータアウトなどのパラメータは、すべてのプロファイルにわたって同じです。
んー基板にあった謎の青い四角のボタンはこの「MENU」ボタンでプロファイルを切り替えられるってこと?(要確認)
GUI Blocks
次にマニュアルは画面の簡単な説明が続きます。よくわからないのは、右側に並ぶ3つの丸い矢印の意味。なんとなく各モーターの向きを表しているようですが、詳細はおいおい理解できるんじゃないかと。
GUIは異なる機能ブロックを含んでいます。:
1 画面中央にはタブで組み合わされた設定画面があります:
Basic – 基本的なジンバル安定化設定。これらの設定の調整はカメラの適切な安定化を達成します。
Advanced — より正確なチューニングオプション。
(省略)
Firmware Update — ファームウェアおよびGUIソフトウェアのバージョンおよび更新オプション。2 Connection – COMポートの選択と接続状態。
3 Profile — プロファイル選択、ロード、再命名、および保存。
4 Control Panel — ジンバルの向きや角度を3つの軸でグラフにより視覚化。
・黒い矢印は角度を表示して、青の矢印は、より高い精度を提供するために、10倍の倍率です。細い青線は、中央、中性点(ナチュラルポイント)からの最大たわみを示しています。
・青い数字はピーク偏向振幅を示している。これらの数値を用いて、安定化品質を推定することができる。
5 READ/WRITE/RESET TO DEFAULTS ボタン。デフォルトにすべての設定をリセットします。
6 画面の下部。ヒント、ステータスまたは(赤色で)エラーメッセージが表示されます。全体的なサイクルタイムおよびI2Cエラーカウントも表示されます。
Basic Settings.
注意:お使いのコントローラをチューニングする前に、しっかりとジンバルにカメラを設置し、ジンバルの重心が可能な限り平準化されていることを確認。
まずは大切なポイント。設定を編集する前にカメラをセットしてバランスを調整しておく必要があります。ということは、まだバッテリーをつないじゃいけないってことになりますね。そしてスタンドも必要ってことが判明します。幸いにも、このキットはハンドル部分がスタンドに早変わりする優れもの。
バランスの取り方は動画を参考にしてください。
2:00〜3:00の部分です。asanoさんの解説動画はセッティングの参考になりますのでぜひご覧ください。
続いてPIDの説明が続きます。ここは訳しても私には意味が正確に理解できませんでした。なので、さらっと途中を省略しておきます。たぶんかなり重要な部分だとは思いますが(T_T)
P- Pは – 外乱応答の力を説明します。値が大きいほど、外乱に対する強力な応答反応を意味する。速い外乱の安定化の品質が十分になるまで、この値を上げてください。(略)
D- “D”の値は、反応速度を低下させる。この値は、低周波数の振動を除去するのに役立つ。 IMUセンサが振動にさらされたときが高すぎる”D”の値は、特に、高周波の振動を引き起こす可能性がある。
I– 「I」の値は、ジンバルがRCコマンドへ入り、そしてニュートラル戻る速度を変更します。(略)
Limit Accelerations – このオプションはリモートコントロールスイッチかシリアルコントロールの場合の雑な加速度を制限できます。(略)
POWER – モータに供給される最大電圧。 (0-255 255がフルバッテリ電圧手段) あなたのモーターの特性に応じて、このパラメータを選択します。基本的なチューニング:
・モーターはあまりにも高温になるべきではありません!80Сのモータ温度は、モータの磁石に永久的な損傷を与える可能性があります。
・低すぎる電力値はジンバルを稼働(略)
・パワーを上げると、PIDの設定の「P」の値を上げると等しい。あなたは電力値を上げた場合は、同様にあなたのPID値を調整し直す必要があります。
わかったようなわからないような…
続きは
http://iwasakijp.com/brushlessgimbal/3axi2/
を参考に実験して見る予定です。実は作業を止めています。というのもバッテリーの容量確認ができないのでパーツを取り寄せ中です。国内なのですぐ届きますが。
一応、リポバッテリーって結構敏感というか丁寧に扱わないといけないようなので。時間があればその辺も合わせて記事を書きたいと思っています。
続く
Sponsored Link
関連記事
-

-
GH3とGH4と70Dとレンズなどを購入検討してみる妄想のお時間
消費増税による便乗値上げなのか?それともキャッシュバックによる影響なのか?微妙な値上げに苦しむ毎日で
-

-
カッコイイシンセサイザー IMAGE LINE HARMOR 無料プリセットをメモ
デザインもカッコイイ。そして音もすごい超おすすめのシンセ、IMAGE LINE の Harmorちゃ
-

-
Ktai Style (携帯対応プラグイン)
WordPress Plugins/JSeries http://wppluginsj.source
-
-
ペンション・民宿・プチホテル用 宿泊予約 WordPress プラグインを作る(10)空室管理画面 A
さっそく空室管理画面を作っていきます。今回は画面設計中心です。部屋タイプの選択と、空き情報を更新する
-
-
CakePHP 認証に再挑戦 アソシエーション編
toyosystemさんに「memberがusersをhasmanyで userがgroupにbel














ご質問は掲示板へお願いいたします。