GimbalSetting
調整信号。さん提供の 3 Axis Brushless Gimbal (ブラシレスギンバル)設定ガイドです。記載された内容により破損等のトラブルがおきても一切保証されません。「謝罪しろ〜賠償だ〜」とか言わないで下さいね。すべて自己責任でお願いします。
セッティングイメージ
とりあえずわかったことはPはDよりも小さい方が期待した効果を得られると書いてありました。
理論上はP(比例)だけで目標値へ操作できるのですが、実際はモーターのパワーや動かす物体のバランスにより、Pの操作だけでは目標値ぴったりと調整できないので、細かい操作を「I」で行うことらしいです。
DはPとにたような操作をするのですが、急激な変化に対応したもので、これも目標値へもっていくものです。なんでDが必要かというと、何らかの外部的な急激な抵抗をPだけで操作させると、目標値から大幅にソレてしまうからです。
これだけだとピント来ないので・・・
例えるなら、水面に浮かんだモータボートがイイかもしれません。
まったく波のない水面に浮かんだボートが船着き場へ向かいたいとします。そこでPの操作(船外機のエンジンスロットルを徐々に上げてスピードを上げます)を開始して、船着き場に到着する前でゆっくりとPの操作を小さく(エンジンスロットルを閉じていく)していきます。これは当たり前ですが水面の上を惰性で進んで船着き場へじわじわと近づくためです。
通常はこれだけで何とか船着き場へ到着となるのですが、実際は船着き場へぴったり寄せるためにエンジンスロットルを細かく繊細に操作する時間が必要です。これが「I」の操作する時間です。熟練船長は短時間で操作してぴったりきれいに船体を寄せることができるでしょう。
水面はいつも穏やかとは限りません。
もしも船着き場へ行く途中で一部の水面で急な流れがあるとします。そこを通るわけですが、先ほどのP操作のままでは船着き場へ同じ時間に到着しません。
そこでモーターボートが穏やかな水面の時はP操作のままで行きますが、急な流れに差し掛かった瞬間に熟練船長は「もっとエンジンスロットルを開けないと同じペースで進めない」と判断して流れに負けないように操作します。これがD操作です。
調整のポイント
- とりあえずわかったことはPはDよりも小さい方が期待した効果を得られる
- センサーケーブルは40cm以内。
- Pの値が必要以上の数値だと、モータから「ギギー」と変な音が出ます。これは多分モータが力みすぎている(笑)と推測します。更にP値を増やすとギーとうるさく鳴り全く動かない状態になります。
ほっておくと壊れるかもしれませんので急いでUSBとバッテリーを抜きます。 - 最初に参考値(別窓)を入れます。ハンドルを傾けて安定している場合、一度安定しなくなるまで数値を下げてから数値を上げていく。
- 「I」の調整はPのテスト時にどうしても落ち着かない時(目に見えるようなプルプルが止まったるが、微妙に動いている感じ)に0.01から徐々に数値を増やしていくと目標値にほぼ近い感じで落ち着いて姿勢をキープしてくれるようになります。最低でも0.01は入れておいたほうがいいかなと思います。
- CALIB GYROはYAWのセンサー(GUIの右上の方位磁石)が正しく認識していない時にかける程度にしています。
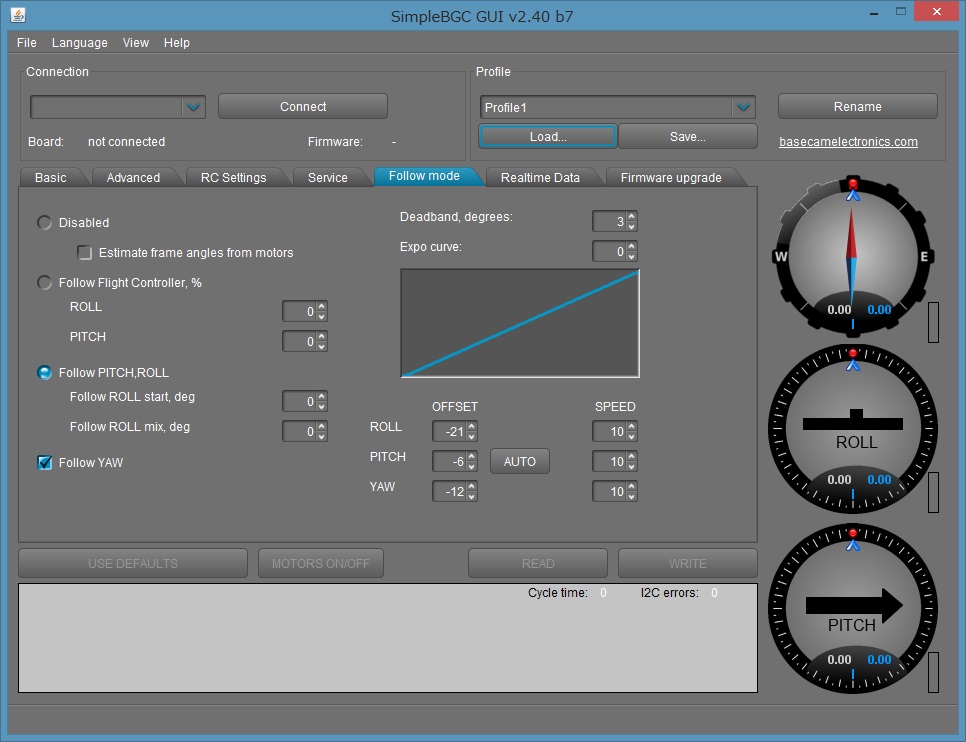
- 事前にGUIのFollow Mode タブで使用しない(Disabled)のラジオボタンをクリックしてください。Follow YAWのチェックボックスはオンのままでPID調整しました。でもオフにしたほうが素の状態を見れるかもしれません。全部設定が終わったらフォローモードを使用する(Follow PITCH-ROLL-YAW)に設定してください。◎テスト時はなるべく余計な設定をはずして単純にしたほうが最初は理解しやすいかなと思いました。理解が深まればいろんな応用をしてみるのもいいかもしれません。
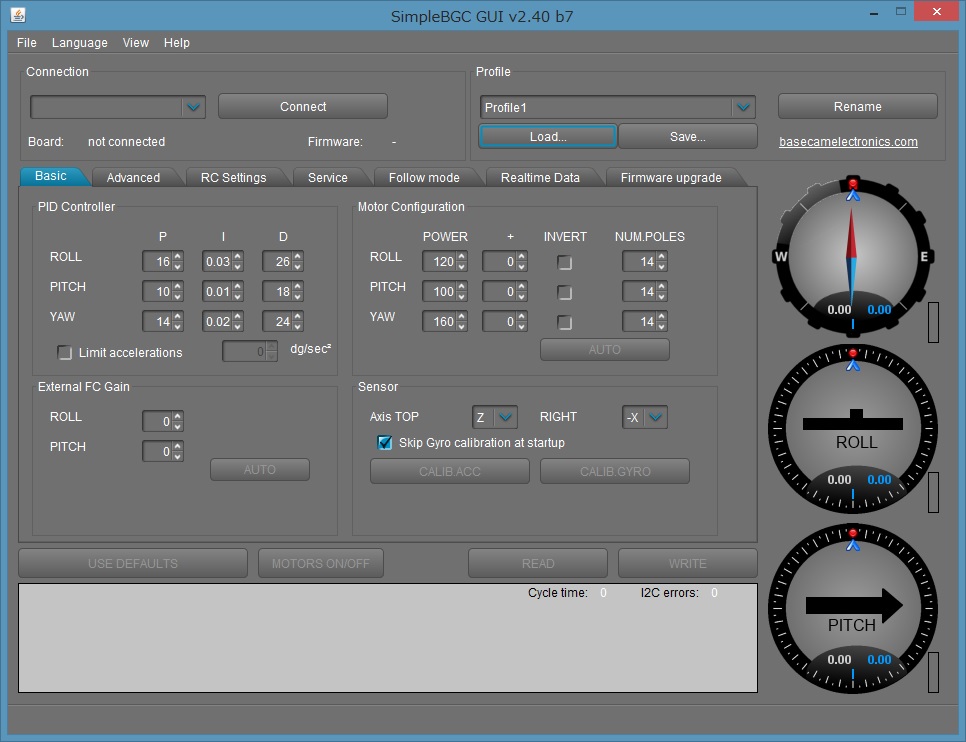
- Simple BGC GUIのNUM.POLESはモーターの永久磁石の数(Y)
- INVERTをAUTOで正確に設定する時にPIDは全て0でPOWERは80以上にして実行しなければならない。(Y)
本体の調整
私のジンバルは初めからYAW軸がグラグラしていました。もちろんこれで走ったらガタガタです(笑)
軸受けを分解して原因を突き止めました。
1つ目は下部フレーム側の軸受けと上部カーボン(モーター側)の軸受けの接地面が歪んでいました。ここは電動ドリルの回転使って、研磨してぴったりと張り付くくらい平らにしました。
2つ目は軸受けのボールベヤリングの遊びが大きいので軸自体をしっかり支えていませんでした。
精度の高いボールベヤリングが手元にないので、ベヤリングからモータの軸までの間をワッシャー3枚かましてガッチリと支えるようにしました。
これでYAW軸のグラグラは見事解消できました。
ギンバルの電源OFF時にやっておくバランス調整
このバランスチェックは均等にバランスの取れた3軸を求めることで、あらゆる状況でスムーズにブラシレスモーターが駆動すること目的にしています。またバランスが取れていることで無駄な振動や左右で異なる挙動などのクセを極力排除するのが目的でもあります。
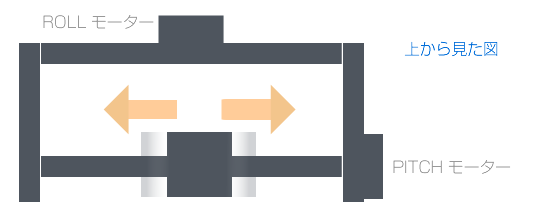
1.ROLL軸の水平
カメラをギンバルにマウントし、ギンバルをスタンドなどで浮かせた状態にします。
(1)ROLL軸の水平を確認します。ここで水平になっていればクリア。
(2)ROLL軸を右に45度、左に45度の位置で停止した状態を維持できればクリア。
(3)右に約15度の位置から手を離して水平に戻る時間と、左15度の位置から水平に戻る時間がほぼ同じであればクリア。
以上の3つがクリアできない場合はROLL軸のカーボンパイプ位置を調整します。
2.YAW軸の水平
PITCHのPID設定と同じようにギンバルを上に向け、カメラは正面を向きます。
分厚い辞書を2冊用意して両ハンドルを置くと安定してやり易いです。
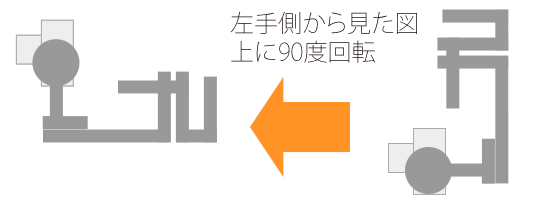
(1)YAW軸が回転しないで垂直を保つことができればクリア。
(2)ROLL軸を45度回転させた位置でYAW軸が姿勢維持できればクリア。
以上の2つがクリアできない場合はカメラマウント位置をPITCH軸(PITCH軸のカーボンパイプへ固定する部品等)の左右で調整します。
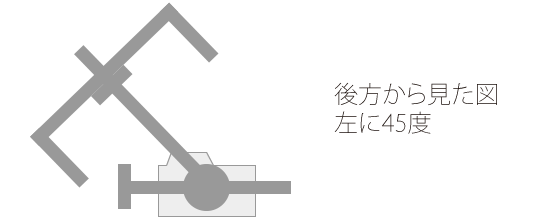
3.PITCH軸の水平
YAW軸の水平チェックと同時になります。
(1)カメラを前または後ろ45度に倒します。ここでカメラの姿勢を維持できればクリア。
(2)ROLL軸を45度回転させた位置でカメラの姿勢が維持できればクリア。
以上の2つがクリアできない場合はカメラの重心高とPITCHのモータ軸が一致していませんので、カメラの高さ位置を調整します。
4.カメラの重心高について
例えばボールの重心点は中心部にあります。ボールを床に置いたところから中心部までの高さを重心高と言います。
カメラも重心高があります。簡易的な調べ方はグリップ側を下にしてカメラを縦にします。グリップをCDのような硬い板に乗せ、抵抗の少ない棒などに乗せます。ここで一番バランスの取れるところが重心高となります。だいたいはグリップの中心あたりです。
この重心高の位置とPITCHのモータ軸の位置が一致するとモータの負担にムラが無く、安定しやすいです。
関連した話題ですが、重心高はカウンターバランス機能(チルト操作で任意の位置に停止可能)があるビデオ雲台で重要な関わりを持っています。ビデオ雲台ではそれぞれに使用できる重心高の限界が決められています。これを超えた重心高のカメラでチルト操作すると支えきれずに停止させることができません。
5.もうすこしシビアに調整する方法
重心位置を変える方法として、各軸のカーボンパイプ位置を移動させる方法を最初に行い、それでもクリアできない場合、「薄型貼り付けバランスウエイト(鉛) 5g/10g刻み」を用意します。これを少しずつ張り付けて(仮止め)バランスの取れる位置と重さを求めます。位置と重さが分かったら、両面テープで固定します。
6.六角レンチでネジを回すのは大変と感じたら
ラジコン用に六角ネジ用の先端にグリップが付いた「6角棒ドライバー」が1000円前後で販売されています。これがあると作業が楽です。
また水平を確認するために「プラスチックレベル」もあると便利です。
最初にバランスチェック(一応参考までに)
必ず一番最初にやることは「電源無しでのバランス調整」です。カメラ部分の左右・前後バランスは当然、ギンバルを持ってゆっくり前後左右に傾けても、カメラ部分が回転しないようになるまでバランスを調整しましょう。
これをしっかり行わないと、GUI設定に苦労します。逆にGUI設定がなかなかうまく行かない場合は、このバランス調整を見直すことで動きが安定することが多々あります。(overfree)
私独自のやり方を記事にしましたので参考にしてみてください。(バランス調整:別窓)
調整方法は動画のページに参考動画をリストアップしました。
PIDの役割について
とりあえずわかったことはPはDよりも小さい方が期待した効果を得られると書いてありました。
理論上はP(比例)だけで目標値へ操作できるのですが、実際はモーターのパワーや動かす物体のバランスにより、Pの操作だけでは目標値ぴったりと調整できないので、細かい操作を「I」で行うことらしいです。
DはPとにたような操作をするのですが、急激な変化に対応したもので、これも目標値へもっていくものです。なんでDが必要かというと、何らかの外部的な急激な抵抗をPだけで操作させると、目標値から大幅にソレてしまうからです。
これだけだとピント来ないので・・・
例えるなら、水面に浮かんだモータボートがイイかもしれません。
まったく波のない水面に浮かんだボートが船着き場へ向かいたいとします。そこでPの操作(船外機のエンジンスロットルを徐々に上げてスピードを上げます)を開始して、船着き場に到着する前でゆっくりとPの操作を小さく(エンジンスロットルを閉じていく)していきます。これは当たり前ですが水面の上を惰性で進んで船着き場へじわじわと近づくためです。
通常はこれだけで何とか船着き場へ到着となるのですが、実際は船着き場へぴったり寄せるためにエンジンスロットルを細かく繊細に操作する時間が必要です。これが「I」の操作する時間です。熟練船長は短時間で操作してぴったりきれいに船体を寄せることができるでしょう。
水面はいつも穏やかとは限りません。
もしも船着き場へ行く途中で一部の水面で急な流れがあるとします。そこを通るわけですが、先ほどのP操作のままでは船着き場へ同じ時間に到着しません。
そこでモーターボートが穏やかな水面の時はP操作のままで行きますが、急な流れに差し掛かった瞬間に熟練船長は「もっとエンジンスロットルを開けないと同じペースで進めない」と判断して流れに負けないように操作します。これがD操作です。
「文系でもわかる!」3軸ブラシレスジンバルの「PID」キホン
避けては通れない「PID」について、難しい計算式を使わないで解説します。また個々のジンバルに合った「PID」設定のコツも書いておきます。(別窓)
ブラシレスモータの調整方法
- 設定の前に各モーターの出力設定ととりあえずなんとか動くPID設定ができていること前提にします。
海外のサイトで類似する出力モーターとカメラレンズ重量のPID設定を用いると時間の節約になります。(調整のベース設定として入れておく感じで)
List of PID settings for different rigs from users.
ROLL軸のPID設定
最初にROLL軸のPIDから取り組みます。
水平で安定した場所にジンバルスタンドを使って、バッテリ接続、スイッチオンします。各軸のウォーミングアップが終わったら、ハンドルを両手で持って左へ45度に「ゆっくり」と倒します。
ここでROLLモーターがプルプルと小刻み震えている場合はPの値を1増やしてください。書き込み後、再度、リセットして同じように様子を見ます。
このリセットはSimpleBGCボートから2本線で接続されたボタンがあるかと思います。これを長押しします。5秒以上でリセットがかかります。5秒以上が分かりにくい場合はGUIのServiceタブにあるブザー設定で短いブザーを鳴らすように設定しておくと便利です。(Command confirmationにチェック入れる)
これは45度に倒した状態を目標値として、モーターの操作によって維持できるかどうかのテストです。値を1づつ増やしてプルプルが止まる値で正解とします。同じく右にも倒してテストしてください。
次にDの設定をします。ROLL軸を45度倒した状態にしてから、小刻みに左右に動かしてください。ここでは急激な変化に対して目標値にモーターの操作が適切かどうかテストします。Dの値が不足しているとすぐにモーターが脱力します。これは急激な外部変化に対応できないかったことになります。
そこでモーターが踏ん張って45度をキープ出来るD値を1づつ増やして探ります。
これが上手くいったら、次は「I」の設定です。これは目標値に対する「微調整する操作の時間」と思ってください。でも今の段階ではYAW軸の設定が出来ていませんので、あと回します。
YAW軸のPID設定
先ほどのROLL軸PDの設定が済んだところから、今度はYAW軸のPID設定を行います。
ここも水平な場所でスイッチオン、ウォーミングアップ終了後から始めます。
両手で持って、ROLL軸を45度に傾けます。そしてYAW軸の変化を見ます。
中心にあったYAW軸フレームがROLL軸を傾けることでズレることがあります。これはPの値が不足しています。1づつ増やしてほぼ止まってくれる値を探ります。これが出来たら、ROLL軸を45度傾けたまま、YAW軸を左右に小さく小刻みに動かします。ここでモーターが脱力したら、D値が不足していることになりますので、D値を1づつ増やして脱力しない値を探します。「I」は0.01にしておきます。
ROLLの「I」はジンバルの構造やモータータイプによって異なりますが、YAWとROLLが複雑に絡むのでYAWの「I」よりも大きな数字にします。
ちょっと複雑ですが、ROLLとYAWの小刻みテストを同時にやる感じでモーターに負担をかけてみます。ここですぐに脱力する場合は微調整をする時間「I」の数値を0.01づつ増やし、テストを繰り返して脱力しない値を探ります。
PITCHのPID設定
前提として、カメラ、レンズ、バッテリ、フィルターなど撮影時と同じ状態でジンバルへマウントします。マウントバランスは(電源OFF時)PITCHモーターの角度が前後45度、水平ともに姿勢を維持できるようにしておきます。(長いレンズでは水平は無理かもしれません。クルット回ってレンズを壊さないように気を付けてください)事前にカメラの重心位置を調べておくと時間短縮できます。
準備が出来たら、ジンバルを水平な場所でスイッチオン、ウォーミングアップをしてから、両手で持ちます。
ジンバルのハンドルを自分に向けて水平に倒し、カメラが一番高い場所に来るようにします。
ギンバル本体が真上に向いた状態で、カメラは正面を向いた状態です。カメラがギンバルと一緒に真上に向く場合はフォローモードでDisabledにして切ってください。
ここでPITCHモーターがプルプルきたらPの値が不足しているので1つづ増やして探ります。
次にDの設定です。ジンバルを通常にもって、ブランコのようにカメラを小さく前後に振ります。ここでモーターが脱力したらD値が不足しているので1づつ増やして探ります。
「I」の値は0.01をとりあえず入れておきます。
上手くカメラが水平に戻らないときは数値を0.01づつ増やしてください。
これで3軸のPID設定が終わりました。
残りのテストはいわゆる「グリグリ」テストです。
これは3軸をすべて同時に連続してグリグリな感じで動かしてチェックします。(よく海外のYouTubeでアップされている鏡の前で撮影するような感じ)ここで不具合がなければ、ほぼ大丈夫かと思います。
ギンバルの手入れについて
各モータに軸受けとボールベヤリングがあります。
YAW軸の改修をしたときに気付いたのですが、どうも製造時の注油が足りないような気がしました。
そこでフッ素樹脂配合の特殊浸透潤滑剤「ワコーズ RP-C ラスぺネ」を試しにほんの少しだけ注油しました。ベヤリングや軸受けの回転が一段とスムーズになりました。とくにベヤリングには効果的との評判です。
ただしモータ本体のベヤリングは壊したら困るのであえて注油はしていません。
この影響でPIDの設定も低い値(エコ?)で済むようになりました。
もし機会があればお試しください。尚、間違っても安いから「クレ556」は使わないでください。石油系溶剤でABSパーツが変質したり割れたりします。昔カーラジコンにガンガン使ったらシャーシーが変色してヒビが入りました。((+_+))
モータや軸受け、そしてシャフトの歪みがないか定規を当ててチェックします。
ここで歪みがあると本来のポテンシャルを生かせないボトルネックとなります。
たいていは分解して定規などを使いながら、正確に組み立てると直ります。
そしてスムーズに可動部が動くか確認します。
この整備方法についてはラジコンヘリなどに共通する部分が多いので、ネットで検索すると詳しい情報がたくさんあります。
私のジンバルは初めからYAW軸がグラグラしていました。もちろんこれで走ったらガタガタです(笑)
軸受けを分解して原因を突き止めました。
1つ目は下部フレーム側の軸受けと上部カーボン(モーター側)の軸受けの接地面が歪んでいました。ここは電動ドリルの回転使って、研磨してぴったりと張り付くくらい平らにしました。
2つ目は軸受けのボールベヤリングの遊びが大きいので軸自体をしっかり支えていませんでした。
精度の高いボールベヤリングが手元にないので、ベヤリングからモータの軸までの間をワッシャー3枚かましてガッチリと支えるようにしました。
これでYAW軸のグラグラは見事解消できました。
モータの脱力について
補足しますと、モータの制御が実際の振動に追従できなくなり、駄々をこねたように仕事を放棄(姿勢をキープすることを止めてしまう)する現象です。
実際の様子は、最初はガクガクと激しく震えだして、そのあとは気絶したように(笑)スーと力を抜いてしまいます。
アンドロイドタブレットでPID設定する方法
用意するもの
1.OTGケーブル
コネクタ形状:マイクロUSBコネクタ(マイクロB)オス※タブレット接続側、USB Aコネクタ メス
2.USBケーブル
コネクタ形状:USB A オス、ミニUSB A オス※ギンバルコントローラー接続側
3.GooglePlayが利用できるアンドロイドタブレット
解像度1280×800以上
筆者はNexus7 2012 を使用しています。機種によっては上手くいかないこともありますのでご了承ください。
4.アプリ(有料111円)
Sbgc Configurator nobt
2種類のSbgc Configuratorアプリがあります。USB接続は末尾「nobt」の方を選んでください。もうひとつの方のアプリでは不安定です。
下記リンク参照
https://play.google.com/store/apps/details?id=nicodh.bgcConfigNoBt&hl=ja
5.事前にギンバルコントローラーの設定項目をメモしてください。
操作を誤るとオールクリア(全設定消去)なることもあります。
手順
- タブレットのGooglePlayからアプリをインストールします。
- タブレットを再起動します。ログインして電源はONのままです。
- ギンバルコントローラーの電源はOFFにしたまま、USBケーブルを接続します。
- 3で接続したUSBケーブル(オス)にOTGケーブル(メス)を接続します。
- タブレットのマイクロUSBにOTGケーブルを接続します。ギンバルコントローラーに給電され、ブラシレスモーターからキューと音が出る場合があります。(通電している証拠です)
- USB機器が接続された旨のメッセージが表示されます。OKをタップします。
- Sbgc Configurator nobtが起動します。左上に赤い丸が表示されます。これはギンバルコントローラーとの接続がされていない印です。
- 画面右上のマーク(縦に四角3つ)をタップすると縦メニューが出てきます。コネクトConnectをタップします。
- 画面下の方に接続成功Successful connectionと表示され、赤い丸が緑の丸になれば接続完了です。逆に接続解除するときは縦メニューを表示して、Disconnectをタップします。
- ほぼPC版のSimple BGC GUIと同じ項目を設定できます。最初に設定しておきたい項目は「SERVICE」->「Buzzer」です。ここでは「Errors」のチェックを外し、画面右下の「Send」を一回だけタップします。ギンバルコントローラーへ書き込みが完了したと英語で表示されます。
注意点として・・・
何も表示されない場合、何らかの原因で送信出来ない可能性があります。何度も「Send」を連続タップするとPID設定がオールクリアになりますので注意してください。
また設定してSendそして次の設定からすぐにSendをすばやく繰り返すとフリーズする可能性が高いです。Sendをタップした後は5秒以上あけてください。 - 接続中はギンバルコントローラーの電源はONにしないでください。アプリがフリーズします。
- タブレットによっては起動時に警告(JAVA関係)が出ます。手順8から10項目が正常に出来れば問題ありません。
アナログジョイスティックについて
現象:
アナログジョイスティックを操作して指を離してもPITCHまたはYAWが微妙に動いている現象
原因:
トリム調整が不完全
解決:
SimpleBGC GUI ->Advancedのタブ->RC Sub-TrimでAUTOボタンで設定する。
Deadband around center(無反応範囲)の数値を少し増やして様子を見る。
アナログジョイスティックを左右上下に操作して、同じような落ち着き方になれば調整完了。完全には同じ場所に止まりませんのである程度妥協が必要です。
Alexmos Brushless Gimbal のジョイスティック配線図(8bit版)-別窓-
設定事例(調整信号さん)
設定時の条件について
ブラシレスジンバルコントローラー
Alexmos 3Axis 8bit
ファームウェア
SimpleBGC GUI v2.40 b7
ブラシレスモーター
iPower GBM5208 200T(3軸)
負荷重量800gから1500g
カメラとレンズ
GH4 560g
LUMIX G X VARIO PZ 14-42mm/F3.5-5.6 ASPH./ POWER O.I.S. 95g
セッティングの内容について
フォローモードONで高速な180度のパン、上下のチルトなど、BGを自由に振り回せるセッティングが出来ました。(あくまでもGH4のような軽いカメラレンズでの話です)
これよりも重量のあるカメラレンズ(EOS5D2など)で使用する場合はPITCHモーターのPOWER値を上げた方がいいです。またROLL、YAWモータも同様に上げます。(各軸+20以上がおススメかも)
(再度PIDの設定が必要となるかもしれません。)
POWER値を必要以上に上げ過ぎると、「ギー、ギー」とモーターから音がしますので値を落としてください。またBGを持って歩行中に、モーターから小さく「ギュン、ギュン」と音が聞こえると同時に微振動が生じる場合はDの値が大きすぎますので、段階的に値を小さくしてテストします。
正しいセッティングをしたBGはほぼモーターは「無音」です。またモーターからの「微振動」はほとんどありません。これを基準としてPIDをセッティングしてみてください。
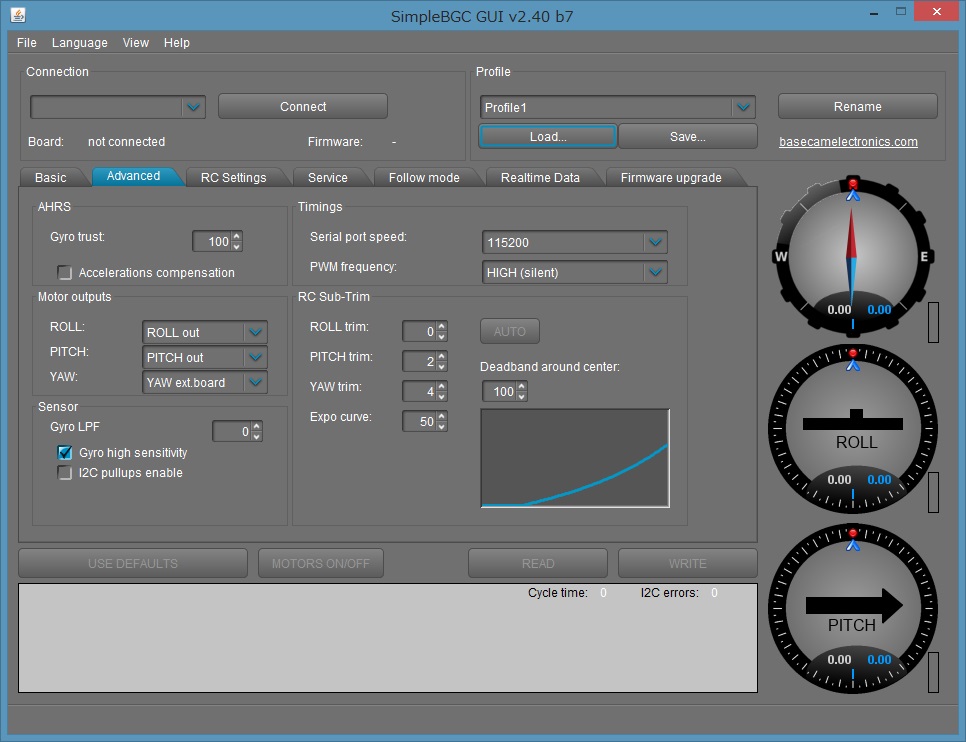
Advancedタブの1番左上のAHRSのGyro trustの設定について
MAXの数値を100だと勘違いされているかたが多いと思います。
因みに説明書を見る限りトリッキーな操作をする場合は100〜150を入力することで操作中ズレは出てくるが持ちこたえてくれる。逆に安定した穏やかな操作をする場合は40~80を入れることでジンバルのズレの無いものになる。
あくまで私の意訳と解釈が入っていますけど。
あと操作とは説明書ではフライトとなっています。ハンドヘルドの場合は操作のことと私が勝手に解釈しています。
因みに私は走り撮りよりスローの舐め撮りなので入力値は65〜75辺りを入れています。
因みに次のチェック項目のAccelerations compensationは外部フライトコントロールのキャリブレーションしている場合のみ有効となっていますからハンドヘルドには無関係ですね。Gyro trustの設定の最低値は0最高値は255(Y)
マックス255にしてクイックなパンチルトするときっちりと向けた方向で止まってくれます。ただし、水平にきちんと戻らず若干傾いたままな状態が続きます。
逆にパラメータを小さく(50)すると急激なパンチルトをしたら、カチッと止まらないような気もしましたが、255とたいして変わらない感じでした。
変化した点といえば、水平にきっちりと戻ることでしょうか。試しに室内でローアングルの走り撮りしてみると結構イイ感じでした。
BGの3軸バランスがとれていれば、ジャイロの信頼度を落としてもイイのかなと思いました。

参考までに
徹夜でヘタヘタの足腰で頑張っています・・・ステディカム歩行がまったくなっていないので映像がポンポンはずんじゃっています(笑)
まぁ適当に歩いてもこれだけ安定して撮れたのでヨシとしました。
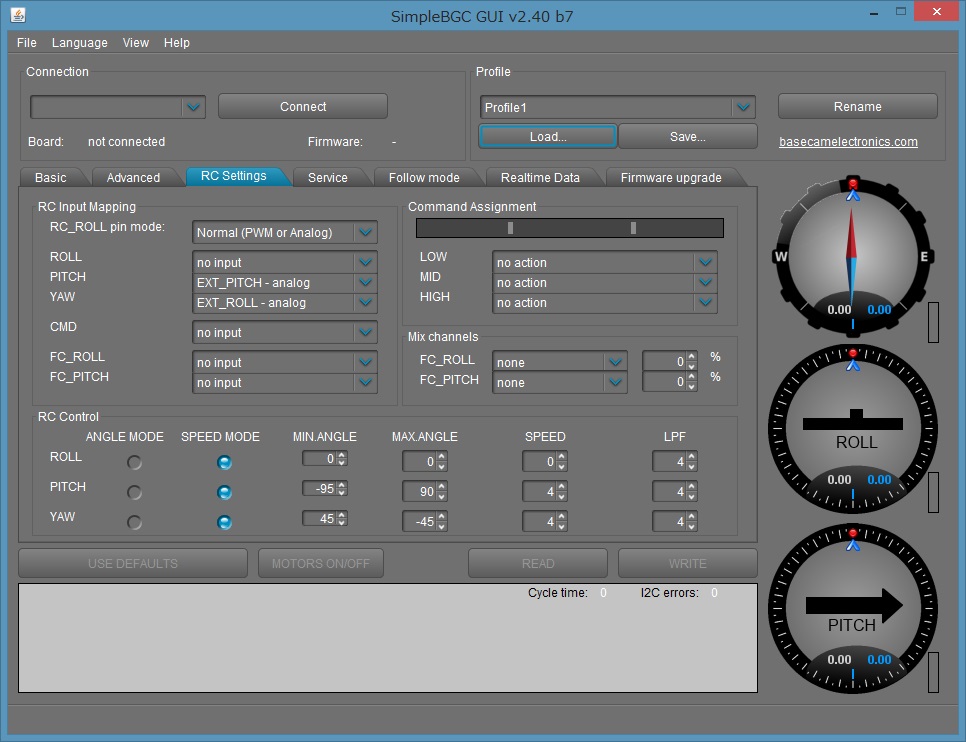
映像中で若干、右にピクッと動いているカットがありますが、原因はSimpleBGC GUIのRC SettingsのタブにあるRC ControlのLPF(ローパスフィルター)設定で解決の見通しが出てきました。これはジョイスティックなどで任意チルトパン操作する部分の設定で、小さな信号を通すかどうかフィルタリングするものです。つまり右にちょっと動くのはわずかなジョイスティックなどの信号に過敏に反応しているようです。LPFを少し上げることで各軸の微妙なバタバタ動く値がピタッと大人しくなります。マックスに設定するとジョイスティックが全く使えなくなります。使いやすくてバタバタしないところを探しました。
参考リンク
BaseCam SimpleBGC -Alexmos-
BaseCam SimpleBGC controller configuration guide
How to connect and setup Alexmos 3 axis brushless gimbal controller
Balancing your brushless gimbal
Adding a Joystick to your Alexmos Brushless Gimbal Controller
(Y)杉吉ゆうじさんによる解説です。
特に記載のない部分は調整信号。さんによる解説です。
以上 調整信号。さん他の方々、本当にありがとうございました。
修正要望等のあるかたはコンタクトよりご一報下さい。協議・検討・対応させていただきます。ご質問はブログの最新記事にでもコメントでお願いします。先生方が優しくお答えくださると思います^^;
Sponsored Link
公開日123:
最終更新日:2014/07/26