
初めての Simple BGC GUI 32bit バージョンのお勉強
公開日:
:
最終更新日:2014/05/21
Brushless Gimbal Alexmos, GimbalCustomize, SimpleBGC
あらためてマニュアル解読のお時間です。当然32bit用を基礎から調査してみます。翻訳は専任の Google 先生と私(ハート)間違っていたらご指摘よろしくお願いいたします。
早速32bitバージョンのページへ。ちょっとドキドキしますね。
http://www.basecamelectronics.com/downloads/32bit/
Connection Diagramm for boards ver.3.0 ってやつと Serial Protocol Specification (ver. 2.4) の調査から始めてみます。
最初にConnection Diagramm for boards ver.3.0 を開いてみると..見慣れた図が出ました^^;
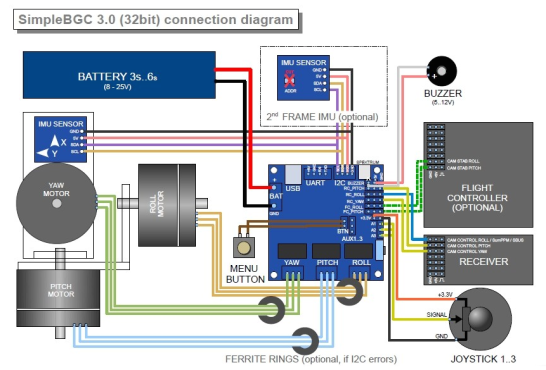
なんだここから来ていたんですね。知らなかった^^; では続いて Serial Protocol Specification を確認してみましょう。

ハイ終了〜〜〜(笑)シリアルプロトコロの技術的な話が続いているようです。意味不明なのでスルーしましょう。
本題のマニュアルを開いてみます。
最初はいつもの通りUSB仮想ドライバを入れてねって話です。次にUSBを接続しますがここで赤字で注意書きがでてきます。
It is safe to connect USB and main power (battery) simultaneously. But be very careful to not reverse the polarity of the main battery, because in this case it will burn out controller and may damage your PC!
バッテリーの極性を逆にするとコントローラーやPCがぶっ壊れるから注意ね! って感じでしょうか? 続いてBluetoothについて書いてあります。注目点は「Note, that HC-06 with original firmware does not support ‘Even’ parity. It will connect to GUI, but won’t let to update firmware」。どうやら使えそうです。例のブツ。でも電波法違反になるので技適マーク付きの発売を待ちましょう。
以下、基本的な使い方の解説になりますが、この辺りは 8bit 用と同じみたいです。そして一番知りたかったセンサー部分が出てきます。
以下引用
Second IMU sensor
There is an option to install the second IMU sensor on the gimbal’s frame. The advantage is more precise stabilization (you may use lower PID’s to get the same quality) and knowing of frame tilting, that greatly helps for 3-axis system to extend the range of working angles.
ジンバルのフレームに第二のIMUセンサーをインストールするオプションがあります。利点は、以上です
正確な安定化(あなたは同じ品質を得るために低いのPIDのが使えます)及びフレーム傾倒を知って、その
大幅に作業角度の範囲を拡張するための3軸システムのために役立つ。
Second IMU should be connected to the same I2C bus as main (in parallel). Sensors should have different I2C-address (Main IMU – 0x68, Frame IMU – 0x69). On the Basecam IMU, address 0x69 may be set by cutting the ADDR bridge, located on the back side of the sensor:
第二IMUは、(並行して)メインと同じI2Cバスに接続する必要があります。センサーは別のI2Cアドレス( メインIMU-0x68、フレームIMU-0x69の)持っている必要があります。 Basecam IMUに、アドレス0x69のは、センサの背面側に位置ADDRブリッジを切断することによって設定することができる。
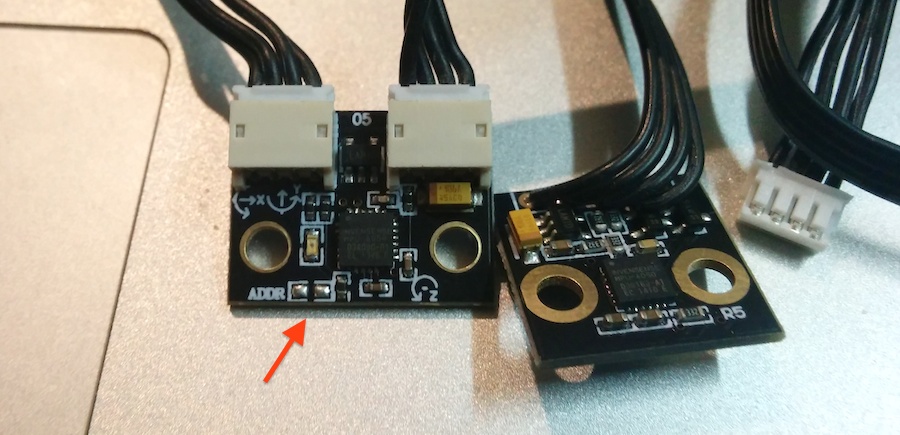
届いた製品を見るとADDR部分が切れています。これがセカンド(Frame)IMUですね。
Mounting the Frame IMU
There are two options where to place the second IMU: below YAW motor and above it. In case of 2-axis stabilization, there is only one option – above ROLL motor.
セカンドIMUの設置は2箇所を選べるよ。YAWをモーターの上かYAWの下でROLLの上。2軸の場合はROLLの上だけしか選べないぞ。
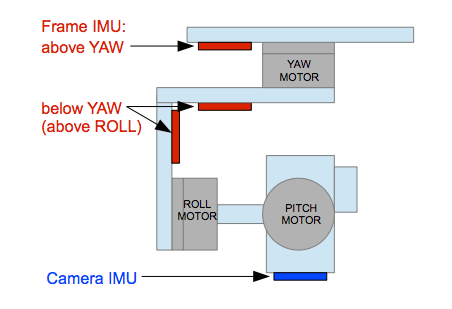
If the sensor is placed above YAW motor, it helps to stabilize ROLL, PITCH and YAW motors. But the system becomes less stable during long work (because the frame heading, estimated from the second IMU, may drift with time and auto-correction may not work in all cases).
センサはYAWモータの上方に配置されている場合は、ROLL、YAW PITCH及びモータを安定化させるのに役立つ。しかし、 フレームの上部への設置は、第二のIMUから推定されるため、システムは(長い作業中に安定性が低くなります)すべての場合に動作しない可能性があり、時間と自動補正してドリフトすること。
しかし、このシステムは、長い作業中に安定性が低くなります。(フレームの上部への設置は、第二のIMUから推定されるため、すべての場合に動作しない可能性があり、時間と自動補正してドリフトすること。)
If the sensor is placed below YAW motor, it does not help YAW axis stabilization, but works more reliable.
センサはYAWモータの下方に配置されている場合は、YAW軸安定化を助けるが、より多くの仕組みはありませんYAW軸の安定化を助けません。しかし、より信頼性の高い動作します。
信頼できる。
Like the main (camera) IMU, the frame IMU may be mounted in any orientation, keeping its axis parallel with motor’s axis.
メイン(カメラ)IMUと同様に、フレームIMUは、その軸線を平行に保ち、任意の向きに取り付けてもよい
モータの軸と。
後は“Advanced” tab, “Sensor” で設定できる等々。
せっかくならYAW上に付けたほうが精度が高いってことなのでチャレンジしてみたいけど配線が(T_T) 二股にわかれてないで基板からセカンダリIMUに線がいって、セカンダリからカメラIMUに線が伸びているから….つまり基板から上に線が行って同じルートを戻ってきて今度はカメラIMUに線が行くという…^^;
最初から基板に2箇所あればいいのに。
Sponsored Link
関連記事
-

-
今年最後の桜撮影テスト 十王公園の桜が散り始めて綺麗
Brsuhless Gimbal の設定を調整したので、近所の公園で撮影してきました。曇り空の合間の
-

-
Brushless Gimbal Controller Box を作ってみた – 検討編 –
TRUSCO プロテクターツールケース XLのスポンジを切り抜いて入れようとしたらボックス部分が微妙
-

-
日本語化?Blackmagic Design DaVinci Resolve Lite 11.1.4?
Blackmagic Design さん。妙に印象が良いというかイケてるイメージです。応援しています
-
-
DIY Brushless Gimbal (Simple BGC) の設定をイロイロ試してみた
最初の頃から比べれば安定してきたと言えるブラシレスギンバルですが、いろいろな動画を見るとがっくりしま
-
-
楽天ブックスで買ってみた感想
数日前の話だが、楽天ポイントが貯まっていたので楽天ブックスで購入してみた。全体的には問題ない流れだっ














Comment
こんにちは。
新しいものはワクワクしますね~!
楽しそうな作業光景を想像してます。
輸入機材は最初に「英文との格闘」で苦労する気持ちわかります。
8bitもそうなんですがセンサーケーブルが短いと感じます。うろ覚えですが、メーカーサイトには40cm以内にしてくれと書いてありました。これ以上長いと信号が正しく送信できないらしいです。
※情報提供(役立つかどうかわかりません(?_?)
昨日は徹夜でYAW軸の軸合わせとPIDの求め方を研究していました。
私のジンバルは初めからYAW軸がグラグラしていました。もちろんこれで走ったらガタガタです(笑)
軸受けを分解して原因を突き止めました。
1つ目は下部フレーム側の軸受けと上部カーボン(モーター側)の軸受けの接地面が歪んでいました。ここは電動ドリルの回転使って、研磨してぴったりと張り付くくらい平らにしました。
2つ目は軸受けのボールベヤリングの遊びが大きいので軸自体をしっかり支えていませんでした。
精度の高いボールベヤリングが手元にないので、ベヤリングからモータの軸までの間をワッシャー3枚かましてガッチリと支えるようにしました。
これでYAW軸のグラグラは見事解消できました。
(長いので次へ続きます)
(続きです)
PIDの求め方を研究すべく本屋で一生手に取って読むことのないような専門書を5冊一気に立ち読みしてきました。
言葉の意味だけ分かったものの、簡単なPID調整の方法が書いてなかったのが残念。
ネットで探しまくると、とある高専の研究発表文書にヒントがありました。
※PIDの役割について素人ながら書いてみます。
とりあえずわかったことはPはDよりも小さい方が期待した効果を得られると書いてありました。
理論上はP(比例)だけで目標値へ操作できるのですが、実際はモーターのパワーや動かす物体のバランスにより、Pの操作だけでは目標値ぴったりと調整できないので、細かい操作を「I」で行うことらしいです。
DはPとにたような操作をするのですが、急激な変化に対応したもので、これも目標値へもっていくものです。なんでDが必要かというと、何らかの外部的な急激な抵抗をPだけで操作させると、目標値から大幅にソレてしまうからです。
これだけだとピント来ないので・・・
例えるなら、水面に浮かんだモータボートがイイかもしれません。
まったく波のない水面に浮かんだボートが船着き場へ向かいたいとします。そこでPの操作(船外機のエンジンスロットルを徐々に上げてスピードを上げます)を開始して、船着き場に到着する前でゆっくりとPの操作を小さく(エンジンスロットルを閉じていく)していきます。これは当たり前ですが水面の上を惰性で進んで船着き場へじわじわと近づくためです。
通常はこれだけで何とか船着き場へ到着となるのですが、実際は船着き場へぴったり寄せるためにエンジンスロットルを細かく繊細に操作する時間が必要です。これが「I」の操作する時間です。熟練船長は短時間で操作してぴったりきれいに船体を寄せることができるでしょう。
残りのDの例えは続きで投稿します。長くなってすみません)
(続きです)
水面はいつも穏やかとは限りません。
もしも船着き場へ行く途中で一部の水面で急な流れがあるとします。そこを通るわけですが、先ほどのP操作のままでは船着き場へ同じ時間に到着しません。
そこでモーターボートが穏やかな水面の時はP操作のままで行きますが、急な流れに差し掛かった瞬間に熟練船長は「もっとエンジンスロットルを開けないと同じペースで進めない」と判断して流れに負けないように操作します。これがD操作です。
頭の中で描きながらやっとここまで用語の理解と実例を具体化できました。
(さて、次はブラシレスモータの調整方法を書きます)
(続きです)
ブラシレスジンバルのPID設定を素人ながらに現時点で理解できたところだけ書いてみます。(これが正解かどうかはわかりませんのでご了承ください)
設定の前に各モーターの出力設定ととりあえずなんとか動くPID設定ができていること前提にします。
海外のサイトで類似する出力モーターとカメラレンズ重量のPID設定を用いると時間の節約になります。(調整のベース設定として入れておく感じで)
最初にROLL軸のPIDから取り組みます。
水平で安定した場所にジンバルスタンドを使って、バッテリ接続、スイッチオンします。各軸のウォーミングアップが終わったら、ハンドルを両手で持って左へ45度に「ゆっくり」と倒します。ここでROLLモーターがプルプルと小刻み震えている場合はPの値を1増やしてください。書き込み後、再度、リセットして同じように様子を見ます。これは45度に倒した状態を目標値として、モーターの操作によって維持できるかどうかのテストです。値を1づつ増やしてプルプルが止まる値で正解とします。同じく右にも倒してテストしてください。
次にDの設定をします。ROLL軸を45度倒した状態にしてから、小刻みに左右に動かしてください。ここでは急激な変化に対して目標値にモーターの操作が適切かどうかテストします。Dの値が不足しているとすぐにモーターが脱力します。これは急激な外部変化に対応できないかったことになります。
そこでモーターが踏ん張って45度をキープ出来るD値を1づつ増やして探ります。
これが上手くいったら、次は「I」の設定です。これは目標値に対する「微調整する操作の時間」と思ってください。でも今の段階ではYAW軸の設定が出来ていませんので、あと回します。
(続きます)
(続きです)
先ほどのROLL軸PDの設定が済んだところから、今度はYAW軸のPID設定を行います。
ここも水平な場所でスイッチオン、ウォーミングアップ終了後から始めます。
両手で持って、ROLL軸を45度に傾けます。そしてYAW軸の変化を見ます。中心にあったYAW軸フレームがROLL軸を傾けることでズレることがあります。これはPの値が不足しています。1づつ増やしてほぼ止まってくれる値を探ります。これが出来たら、ROLL軸を45度傾けたまま、YAW軸を左右に小さく小刻みに動かします。ここでモーターが脱力したら、D値が不足していることになりますので、D値を1づつ増やして脱力しない値を探します。
「I」は0.01にしておきます。
ROLLの「I」はジンバルの構造やモータータイプによって異なりますが、YAWとROLLが複雑に絡むのでYAWの「I」よりも大きな数字にします。
ちょっと複雑ですが、ROLLとYAWの小刻みテストを同時にやる感じでモーターに負担をかけてみます。ここですぐに脱力する場合は微調整をする時間「I」の数値を0.01づつ増やし、テストを繰り返して脱力しない値を探ります。
次はPITCHのPID調整です。
(続きです)
PITCHのPID設定です。
前提として、カメラ、レンズ、バッテリ、フィルターなど撮影時と同じ状態でジンバルへマウントします。マウントバランスは(電源OFF時)PITCHモーターの角度が前後45度、水平ともに姿勢を維持できるようにしておきます。(長いレンズでは水平は無理かもしれません。クルット回ってレンズを壊さないように気を付けてください)
事前にカメラの重心位置を調べておくと時間短縮できます。
準備が出来たら、ジンバルを水平な場所でスイッチオン、ウォーミングアップをしてから、両手で持ちます。
ジンバルのハンドルを自分に向けて水平に倒し、カメラが一番高い場所に来るようにします。
ここでPITCHモーターがプルプルきたらPの値が不足しているので1つづ増やして探ります。
次にDの設定です。ジンバルを通常にもって、ブランコのようにカメラを小さく前後に振ります。ここで
モーターが脱力したらD値が不足しているので1づつ増やして探ります。
「I」の値は0.01をとりあえず入れておきます。
上手くカメラが水平に戻らないときは数値を0.01づつ増やしてください。
これで3軸のPID設定が終わりました。
残りのテストはいわゆる「グリグリ」テストです。
これは3軸をすべて同時に連続してグリグリな感じで動かしてチェックします。(よく海外のYouTubeでアップされている鏡の前で撮影するような感じ)
ここで不具合がなければ、ほぼ大丈夫かと思います。
この方法で調整した結果を動画で紹介します。
(長文失礼しました)
調整信号。さん!!!
素晴らしい内容を書き込んでいただきまして、本当にありがとうございます。私の駄文より数万倍以上有益な内容で思わず何度も読み返しています。
充実していすぎてすべて理解できていませんが、いくつか疑問があるので、後ほど書き込みしたいと思います。出来る範囲でおしえていただければ幸いです。
ホント心から感謝です。まずは御礼まで。
ありがとうございました。
こんばんは!早速ですが質問です。細かい話になり申し訳ありません。気が向いたら教えて下さいませ。
全体的な部分
数値自体は低いほうが良いのでしょうか?
たとえば最初に参考値を入れます。ハンドルを傾けて安定している場合、一度安定しなくなるまで数値を下げて見たほうが良いのでしょうか?
最初のROLL軸についての部分
>ここでROLLモーターがプルプルと小刻み震えている場合はPの値を1増やしてください。書き込み後、再度、リセットして
このリセットとは「CALIB GYRO」ぶたんでよろしいのでしょうか?
YAW軸のPID設定
>ウォーミングアップ終了後から始めます。
両手で持って、ROLL軸を45度に傾けます。
これはROLL軸のフォローモードで傾けるという理解でよろしいですか?つまりカメラ自体が45度傾いた状態になるということでよろしいのでしょうか?
PITCHのPID設定
>ジンバルのハンドルを自分に向けて水平に倒し、カメラが一番高い場所に来るようにします。
一応確認ですが、これはカメラ&ギンバル全体が上を向いた状態ということでよろしいのでしょうか?つまり正面を向いた状態から90度上を向かせるという感じでしょうか?
なんか細かい質問ばかりで心苦しいのですが、迷える子羊なので「しょーがねーなーぁこいつ」とか呟きながら教えていただければ感謝感激です。お暇な時にでも^^;
こんばんは。
コメントに感謝です!
ありがとうございます。
ボードの載せ替えを予定されているのを聞いて、また最初からPID設定を行うのは大変だと思い、ならば編み出す方法を探ってみようと研究しました。夜中の1時過ぎまでテストして手ごたえを得たので、早く確かめたくて翌朝の5時に撮影してきました。それが下記の動画です。
http://youtu.be/npxljzgFIIw
徹夜でヘタヘタの足腰で頑張っています・・・ステディカム歩行がまったくなっていないので映像がポンポンはずんじゃっています(笑)
まぁ適当に歩いてもこれだけ安定して撮れたのでヨシとしました。
映像中で若干、右にピクッと動いているカットがありますが、原因はSimpleBGC GUIのRC SettingsのタブにあるRC ControlのLPF(ローパスフィルター)設定で解決の見通しが出てきました。これはジョイスティックなどで任意チルトパン操作する部分の設定で、小さな信号を通すかどうかフィルタリングするものです。つまり右にちょっと動くのはわずかなジョイスティックなどの信号に過敏に反応しているようです。LPFを少し上げることで各軸の微妙なバタバタ動く値がピタッと大人しくなります。マックスに設定するとジョイスティックが全く使えなくなります。使いやすくてバタバタしないところを探しました。
このPID設定解説は徹夜明けの勢いで手順を書いています(笑)
細かいところはあいまいになっているので、ちょっと整理してから回答します。そうしないと無駄な作業を強いることになり、迷惑がかかるので少々時間ください。(^_-)-☆
調整信号。さん コメントありがとうございます。
ただいま基板をケースに組み込み中です。設定はまだ出来そうもないので、ゆっくりお待ちしております。ハンダ付け下手すぎるし、センサーケーブルのやつも小さすぎてもうね((T_T) お手間をかけてすいません。
LPFってローパスフィルターだったんですね^^;音楽系以外の場所で聞くのは初めてです^^;^^;^^; 無知ですいません。これからは先生と呼ばせて下さい(笑)
できれば、このコメントを整理して記事にしたいぐらいです。
お手すきの時でいいです。よろしくお願いいたします。
ホント助かります(^^)/ m(__)m
こんにちは。
Q and A形式で回答します。
実際にテストして改善点があれば教えてください。
Q.01
全体的な部分
数値自体は低いほうが良いのでしょうか?
たとえば最初に参考値を入れます。ハンドルを傾けて安定している場合、一度安定しなくなるまで数値を下げて見たほうが良いのでしょうか?
A.01
例えばPの値が必要以上の数値だと、モータから「ギギー」と変な音が出ます。これは多分モータが力みすぎている(笑)と推測します。更にP値を増やすとギーとうるさく鳴り全く動かない状態になります。
ほっておくと壊れるかもしれませんので急いでUSBとバッテリーを抜きます。
ご質問のようにプルプルになるところまで数値を下げて、一歩手前の数値を使うとベストです。
後から思い出した点として・・・
「I」の調整はPのテスト時にどうしても落ち着かない時(目に見えるようなプルプルが止まったるが、微妙に動いている感じ)に0.01から徐々に数値を増やしていくと目標値にほぼ近い感じで落ち着いて姿勢をキープしてくれるようになります。
最低でも0.01は入れておいたほうがいいかなと思います。
Q.02
最初のROLL軸についての部分
ここでROLLモーターがプルプルと小刻み震えている場合はPの値を1増やしてください。書き込み後、再度、リセットして
このリセットとは「CALIB GYRO」ぶたんでよろしいのでしょうか?
A.02
説明不足の補充します。
このリセットはSimpleBGCボートから2本線で接続されたボタンがあるかと思います。
これを長押しします。5秒以上でリセットがかかります。5秒以上が分かりにくい場合はGUIのServiceタブにあるブザー設定で短いブザーを鳴らすように設定しておくと便利です。
(Command confirmationにチェック入れる)
CALIB GYROはYAWのセンサー(GUIの右上の方位磁石)が正しく認識していない時にかける程度にしています。
Q.03
YAW軸のPID設定
ウォーミングアップ終了後から始めます。
両手で持って、ROLL軸を45度に傾けます。
これはROLL軸のフォローモードで傾けるという理解でよろしいですか?つまりカメラ自体が45度傾いた状態になるということでよろしいのでしょうか?
A.03
事前にGUIのFollow Mode タブで使用しない(Disabled)のラジオボタンをクリックしてください。
テスト時はカメラ自体が水平になっている状態です。
Follow YAWのチェックボックスはオンのままでPID調整しました。
この方が実際の動作時に近いと判断しています。
でもオフにしたほうが素の状態を見れるかもしれません。
全部設定が終わったらフォローモードを使用する(Follow PITCH-ROLL-YAW)に設定してください。
◎テスト時はなるべく余計な設定をはずして単純にしたほうが最初は理解しやすいかなと思いました。理解が深まればいろんな応用をしてみるのもいいかもしれません。
Q.04
PITCHのPID設定
ジンバルのハンドルを自分に向けて水平に倒し、カメラが一番高い場所に来るようにします。
一応確認ですが、これはカメラ&ギンバル全体が上を向いた状態ということでよろしいのでしょうか?つまり正面を向いた状態から90度上を向かせるという感じでしょうか?
A.04
ギンバル本体が真上に向いた状態で、カメラは正面を向いた状態です。
カメラが一番上にきてにょきっとしている感じです。
カメラがギンバルと一緒に真上に向く場合はフォローモードでDisabledにして切ってください。
A.05
できれば、このコメントを整理して記事にしたいぐらいです。
Q.05
乱雑に書いていますので、これを見やすく記事にして頂けると嬉しいです。自由に利用してください。
きっとこれからはじめる初心者にとって救いになると思います。ぜひ記事にされることをお勧めしたいです。
(追加情報です)
○ギンバルの手入れについて
各モータに軸受けとボールベヤリングがあります。
YAW軸の改修をしたときに気付いたのですが、どうも製造時の注油が足りないような気がしました。
そこでフッ素樹脂配合の特殊浸透潤滑剤「ワコーズ RP-C ラスぺネ」を試しにほんの少しだけ注油しました。ベヤリングや軸受けの回転が一段とスムーズになりました。とくにベヤリングには効果的との評判です。
ただしモータ本体のベヤリングは壊したら困るのであえて注油はしていません。
この影響でPIDの設定も低い値(エコ?)で済むようになりました。
もし機会があればお試しください。尚、間違っても安いから「クレ556」は使わないでください。石油系溶剤でABSパーツが変質したり割れたりします。昔カーラジコンにガンガン使ったらシャーシーが変色してヒビが入りました。((+_+))
モータや軸受け、そしてシャフトの歪みがないか定規を当ててチェックします。
ここで歪みがあると本来のポテンシャルを生かせないボトルネックとなります。
たいていは分解して定規などを使いながら、正確に組み立てると直ります。
そしてスムーズに可動部が動くか確認します。
この整備方法についてはラジコンヘリなどに共通する部分が多いので、ネットで検索すると詳しい情報がたくさんあります。
○モータの脱力について
補足しますと、モータの制御が実際の振動に追従できなくなり、駄々をこねたように仕事を放棄(姿勢をキープすることを止めてしまう)する現象です。
実際の様子は、最初はガクガクと激しく震えだして、そのあとは気絶したように(笑)スーと力を抜いてしまいます。
ありがとうございます。
早速内容をまとめてページを造りました。
https://overfree.gunmaonline.com/gimbalsetting/
順次調整&画像挿入を行いたいと思います。
修正点があればコンタクトより連絡ください。っていうか一度コンタクトから連絡ください(メールアドレス教えてください)m(__)m
32bitいいですね。
私はまだBGにツバつけたばかりですし、さすがにまだ手を出せません。
まだBGとスタンドを入れるケースをどうするか悩んでいたりもします。
本題ですがGoogle先生は説明書を不得意としていて少しコツがいります。
そのまま訳すとたまに逆の意味にも取れてしまいます。
コツは”,”で改行して訳してもらうと良いです。
例えば
If the sensor is placed below YAW motor, it does not help YAW axis stabilization, but works more reliable.
を
If the sensor is placed below YAW motor,
it does not help YAW axis stabilization,
but works more reliable.
と言う感じです。
訳は下記のようになり
”センサは、YAWモータの下方に配置されている場合、
それは、ヨー軸の安定化を助けることはありません
しかし、より信頼性の高い動作します。”
つまり
”センサをYAWモータの下方に配置すると、ヨー軸の安定化を助けないが、より信頼性の高い動作をする。”
でもたまに例外もありますよ。
例えば前文
If the sensor is placed above YAW motor,
it helps to stabilize ROLL,
PITCH and YAW motors.
と改行せずに。
If the sensor is placed above YAW motor,
it helps to stabilize ROLL, PITCH and YAW motors.
センサは、YAWモータの上方に配置されている場合、
それはロール、ピッチ、ヨーモーターを安定させるのに役立ちます。
次いでに()を外して
But the system becomes less stable during long work.
しかし、このシステムは、長い作業中に安定性が低くなります。
では32bitインプレッションお待ちしております。
杉吉さま こんにちは。
ご指摘ありがとうございます。自分なりの解釈で修正してみました。おかしいところはバンバン教えて下さい。ほんとありがたいです。
32bitいいですよ。先ほど記事を書きました。ぜひご覧ください。
バックについては良いアイデアを教えてもらったので明日あたり公開する予定です。カスタマイズ例とともに(といえば誰の情報なのか知っている人はわかるというw)。
ありがとうございました。
ご質問は掲示板へお願いいたします。